Curtain Control Node.
-
My First version of curtain control Node is ready, installed and tested. Some work is pending, which I'll complete on my weekend.
Edit: Code for the Node:Curtain Node
Curtain Control Node.Please share your feedback so that I can improvise.
-
Its a Geared DC Motor with Voltage Rating of 6-12V and 100 RPM. I am using a L239 to control the motor.

-
Looks good. I am curious to see the details... jealous for the speed :runner: your curtain is moving.
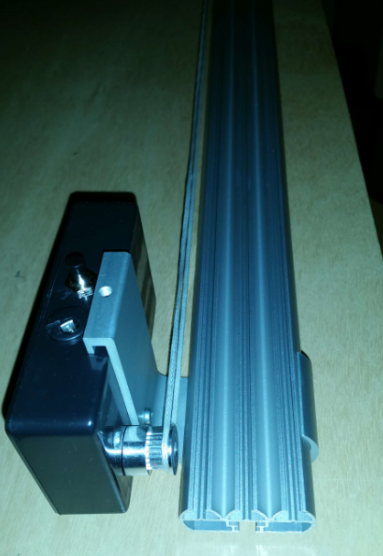
I have been working on a similar project last week. The mechanics and ´looks´ are the most difficult part for me.
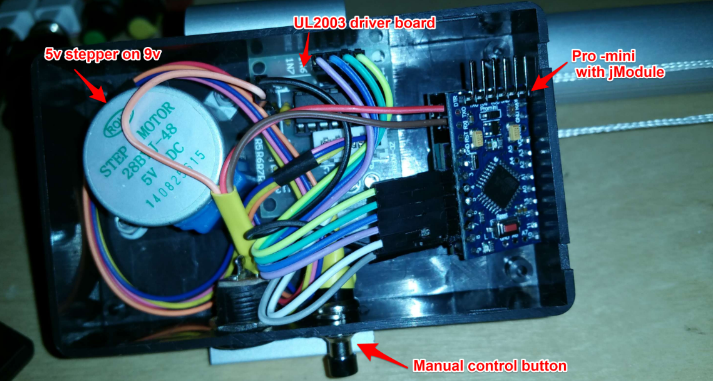
For now I have used a ´tuned´ cheap & small stepper which makes it slooow but effective ;-) The rail and mounting is standard IKEA. The pro-mini has the jModule attached. Works like a charm (/snail)!
-
@AWI Thanks. Why dont you increase the pulley size (larger pulley) that will increase the speed.
I found driving stepper motor to be bit more complicated than driving a DC motor. I picked the Geared motor basis the calculation using this calculator.
Since without rails pulling the curtains on a metal pipe needed more torque. Thus I chose 100 RPM to be a suitable fit.
Will share the Schematics and PCB layout files soon. I have already added the sketch for reference. Since I was testing I did not put the circuit in any housing. But will give some shape soon.
Also will be adding 3 buttons for Manual Control.
-
DC Motor, very interesting!
Do you have end stops? The sketch doesn't open for some reason...
Cheers
-
DC Motor, very interesting!
Do you have end stops? The sketch doesn't open for some reason...
Cheers
@barduino I tried downloading the code, it works. Anyways I am pasting the code below.
For end stops I have not yet decided. I had some Ideas of using Hall effect sensor on both ends and a small piece of magnet in the string to detect ends or Maybe use stop switches. Not sure but will have to try both and see which works the best.
I am yet to clean the code I have some debugging serial prints in code which will remove once finalized.
#include <SPI.h> #include <MySensor.h> int motor_forward = 5; int motor_reverse = 6; int LDRinput = 1; //analog pin to which LDR is connected, here we set it to 0 so it means A0 int LDRValue = 0; //that�s a variable to store LDR values int light_sensitivity = 500; //This is the approx value of light surrounding your LDR int stopSwLeft = 4; int stopSwRight = 3; int stopSwNow = 2; int CHILD_CURTAIN_ID =1; int lastState; MySensor gw; MyMessage msg_S_COVER_U(CHILD_CURTAIN_ID, V_UP); MyMessage msg_S_COVER_D(CHILD_CURTAIN_ID, V_DOWN); MyMessage msg_S_COVER_S(CHILD_CURTAIN_ID, V_STOP); //MyMessage msg(CHILD_CURTAIN_ID,V_UP); // the setup routine runs once when you press reset: void setup() { Serial.begin(115200); // initialize the digital pin as an output for L239D. pinMode(motor_forward, OUTPUT); pinMode(motor_reverse, OUTPUT); // initialize the digital pin as an output for Stop Switches. pinMode(stopSwLeft, INPUT_PULLUP); pinMode(stopSwRight, INPUT_PULLUP); pinMode(stopSwNow, INPUT_PULLUP); gw.begin(incomingMessage, AUTO, true); // Send the sketch version information to the gateway and Controller gw.sendSketchInfo("Window_Curtain", "1.0"); gw.present(CHILD_CURTAIN_ID, S_COVER); } void loop(){ gw.process(); } void cover(int coverVal){ //int coverVal = gw.loadState(CHILD_CURTAIN_ID); Serial.print("Cover is : "); lastState = coverVal; switch (coverVal) { case 0: Serial.println("Opening"); while (lastState == coverVal) { m_left(); gw.process(); checkHWInnputs(); coverVal = gw.loadState(CHILD_CURTAIN_ID); } gw.send(msg_S_COVER_U.set(V_UP)); break; case 1: Serial.println("Closing"); while (lastState == coverVal) { m_right(); gw.process(); checkHWInnputs(); coverVal = gw.loadState(CHILD_CURTAIN_ID); } gw.send(msg_S_COVER_D.set(V_DOWN)); break; case 2: Serial.println("Idle"); while (lastState == coverVal) { m_stop(); gw.process(); checkHWInnputs(); coverVal = gw.loadState(CHILD_CURTAIN_ID); } gw.send(msg_S_COVER_S.set(V_STOP)); break; } return; } void incomingMessage(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. Serial.println("recieved incomming message"); switch (message.type) { case V_UP: gw.saveState(CHILD_CURTAIN_ID, 0); Serial.print("Incoming change for ID_S_COVER:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println("V_UP"); cover(gw.loadState(CHILD_CURTAIN_ID)); Serial.print("Done cover procedure"); //m_right(); break; case V_DOWN: gw.saveState(CHILD_CURTAIN_ID, 1); Serial.print("Incoming change for ID_S_COVER:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println("V_DOWN"); cover(gw.loadState(CHILD_CURTAIN_ID)); Serial.print("Done cover procedure"); //m_left(); break; case V_STOP: gw.saveState(CHILD_CURTAIN_ID, 2); Serial.print("Incoming change for ID_S_COVER:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println("V_STOP"); cover(gw.loadState(CHILD_CURTAIN_ID)); Serial.print("Done cover procedure"); //m_stop(); break; } Serial.print("exiting incoming message"); return; } // the loop routine runs over and over again forever: void m_right() { digitalWrite(motor_forward, HIGH); //terminal D1 will be HIGH digitalWrite(motor_reverse, LOW); //terminal D2 will be LOW Serial.print("Set For:High and Rev: Low"); exit; } void m_left() { digitalWrite(motor_forward, LOW); //terminal D1 will be LOW digitalWrite(motor_reverse, HIGH); //terminal D2 will be HIGH Serial.print("Set For:Low and Rev: High"); exit; } void m_stop() { digitalWrite(motor_forward, LOW); //terminal D1 will be LOW digitalWrite(motor_reverse, LOW); //terminal D2 will be HIGH Serial.print("Set For:Low and Rev: Low"); exit; } void checkHWInnputs() { if (digitalRead(stopSwNow) == LOW) { Serial.println("Detected stop button push. Stopping"); cover(2); Serial.println("Saved stop state to EEPROM"); } if (digitalRead(stopSwLeft) == LOW) { Serial.println("Detected stop button push. Stopping"); cover(1); Serial.println("Saved stop state to EEPROM"); } if (digitalRead(stopSwRight) == LOW) { Serial.println("Detected stop button push. Stopping"); cover(0); Serial.println("Saved stop state to EEPROM"); } } -
Sweet!
My girl has put this on my todolist...
But still have to get started, this is some nice reference for my new porject! -
Sweet!
My girl has put this on my todolist...
But still have to get started, this is some nice reference for my new porject!@franzelare Great. Good Luck with the build.
I'll be posting my HW design and Code as part of Contest on openhardware.io
-
I have published my project with all the files.
https://www.openhardware.io/view/45/Curtain-Control-Node -
@barduino I tried downloading the code, it works. Anyways I am pasting the code below.
For end stops I have not yet decided. I had some Ideas of using Hall effect sensor on both ends and a small piece of magnet in the string to detect ends or Maybe use stop switches. Not sure but will have to try both and see which works the best.
I am yet to clean the code I have some debugging serial prints in code which will remove once finalized.
#include <SPI.h> #include <MySensor.h> int motor_forward = 5; int motor_reverse = 6; int LDRinput = 1; //analog pin to which LDR is connected, here we set it to 0 so it means A0 int LDRValue = 0; //that�s a variable to store LDR values int light_sensitivity = 500; //This is the approx value of light surrounding your LDR int stopSwLeft = 4; int stopSwRight = 3; int stopSwNow = 2; int CHILD_CURTAIN_ID =1; int lastState; MySensor gw; MyMessage msg_S_COVER_U(CHILD_CURTAIN_ID, V_UP); MyMessage msg_S_COVER_D(CHILD_CURTAIN_ID, V_DOWN); MyMessage msg_S_COVER_S(CHILD_CURTAIN_ID, V_STOP); //MyMessage msg(CHILD_CURTAIN_ID,V_UP); // the setup routine runs once when you press reset: void setup() { Serial.begin(115200); // initialize the digital pin as an output for L239D. pinMode(motor_forward, OUTPUT); pinMode(motor_reverse, OUTPUT); // initialize the digital pin as an output for Stop Switches. pinMode(stopSwLeft, INPUT_PULLUP); pinMode(stopSwRight, INPUT_PULLUP); pinMode(stopSwNow, INPUT_PULLUP); gw.begin(incomingMessage, AUTO, true); // Send the sketch version information to the gateway and Controller gw.sendSketchInfo("Window_Curtain", "1.0"); gw.present(CHILD_CURTAIN_ID, S_COVER); } void loop(){ gw.process(); } void cover(int coverVal){ //int coverVal = gw.loadState(CHILD_CURTAIN_ID); Serial.print("Cover is : "); lastState = coverVal; switch (coverVal) { case 0: Serial.println("Opening"); while (lastState == coverVal) { m_left(); gw.process(); checkHWInnputs(); coverVal = gw.loadState(CHILD_CURTAIN_ID); } gw.send(msg_S_COVER_U.set(V_UP)); break; case 1: Serial.println("Closing"); while (lastState == coverVal) { m_right(); gw.process(); checkHWInnputs(); coverVal = gw.loadState(CHILD_CURTAIN_ID); } gw.send(msg_S_COVER_D.set(V_DOWN)); break; case 2: Serial.println("Idle"); while (lastState == coverVal) { m_stop(); gw.process(); checkHWInnputs(); coverVal = gw.loadState(CHILD_CURTAIN_ID); } gw.send(msg_S_COVER_S.set(V_STOP)); break; } return; } void incomingMessage(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. Serial.println("recieved incomming message"); switch (message.type) { case V_UP: gw.saveState(CHILD_CURTAIN_ID, 0); Serial.print("Incoming change for ID_S_COVER:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println("V_UP"); cover(gw.loadState(CHILD_CURTAIN_ID)); Serial.print("Done cover procedure"); //m_right(); break; case V_DOWN: gw.saveState(CHILD_CURTAIN_ID, 1); Serial.print("Incoming change for ID_S_COVER:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println("V_DOWN"); cover(gw.loadState(CHILD_CURTAIN_ID)); Serial.print("Done cover procedure"); //m_left(); break; case V_STOP: gw.saveState(CHILD_CURTAIN_ID, 2); Serial.print("Incoming change for ID_S_COVER:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println("V_STOP"); cover(gw.loadState(CHILD_CURTAIN_ID)); Serial.print("Done cover procedure"); //m_stop(); break; } Serial.print("exiting incoming message"); return; } // the loop routine runs over and over again forever: void m_right() { digitalWrite(motor_forward, HIGH); //terminal D1 will be HIGH digitalWrite(motor_reverse, LOW); //terminal D2 will be LOW Serial.print("Set For:High and Rev: Low"); exit; } void m_left() { digitalWrite(motor_forward, LOW); //terminal D1 will be LOW digitalWrite(motor_reverse, HIGH); //terminal D2 will be HIGH Serial.print("Set For:Low and Rev: High"); exit; } void m_stop() { digitalWrite(motor_forward, LOW); //terminal D1 will be LOW digitalWrite(motor_reverse, LOW); //terminal D2 will be HIGH Serial.print("Set For:Low and Rev: Low"); exit; } void checkHWInnputs() { if (digitalRead(stopSwNow) == LOW) { Serial.println("Detected stop button push. Stopping"); cover(2); Serial.println("Saved stop state to EEPROM"); } if (digitalRead(stopSwLeft) == LOW) { Serial.println("Detected stop button push. Stopping"); cover(1); Serial.println("Saved stop state to EEPROM"); } if (digitalRead(stopSwRight) == LOW) { Serial.println("Detected stop button push. Stopping"); cover(0); Serial.println("Saved stop state to EEPROM"); } } -
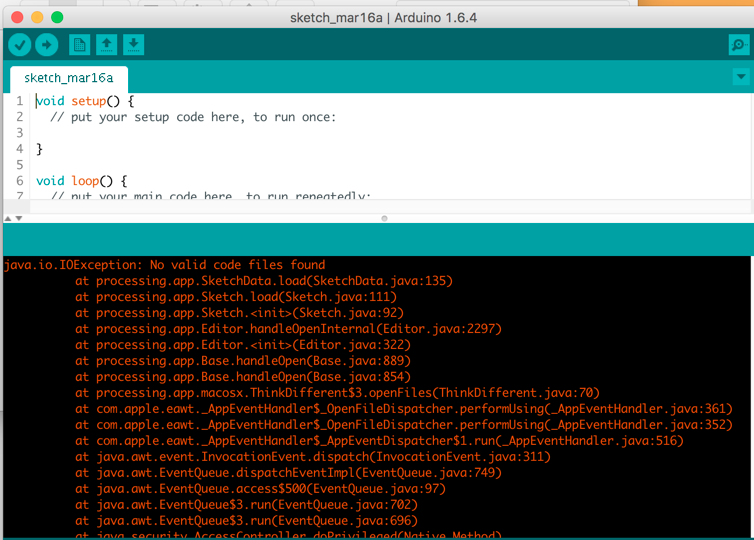
I'm just curious, maybe its the arduino IDE version or something.
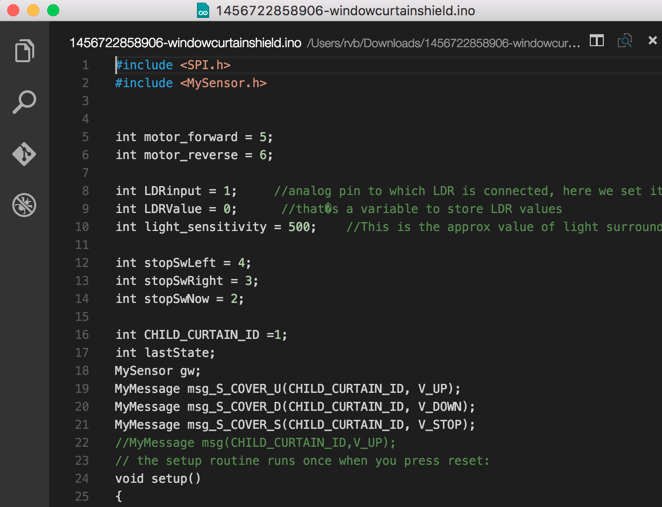
I'm using 1.6.4 and I get this:
However opening with a text editor is fine:
Cheers
@barduino Seems like the IDE. Open any example MySensors Sketch. Delete the contents from sketch and copy paste from my sketch. I guess that should work.
Are you able to compile any other sketch in Arduino?
-
@AWI Are you able to share the sketch you used with the UL2003 driver board? I have tried to combine the MySensors servo sketch with other arduino only sketches utilizing the UL2003, but without luck. Thanks.
-
@AWI Are you able to share the sketch you used with the UL2003 driver board? I have tried to combine the MySensors servo sketch with other arduino only sketches utilizing the UL2003, but without luck. Thanks.
@patchmaster I used the relay sketch and modified it to my needs. Sorry but I dont have any sketch for ULN2003. :disappointed:
-
@AWI Are you able to share the sketch you used with the UL2003 driver board? I have tried to combine the MySensors servo sketch with other arduino only sketches utilizing the UL2003, but without luck. Thanks.
@patchmaster This is my current curtain control sketch. I work with the development branch, so the syntax can be a little different.
The Accelstepper library gives you all the abilities to slow start/stop with numerous kinds of steppers.
My sketch includes a calibration function (stored in EEPROM) so the you don't need end stop detection (a stepper knows where it is)/* PROJECT: MY Sensors curtain controller PROGRAMMER: AWI DATE: march 11, 2016 FILE: AWI stepper1.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 (Development) Special: uses AccelStepper library Summary: Curtain control with stepper motor. Manual operation with 1 push button Calibration with manual button Remarks: Fixed node-id Change log: 20160312 - Cleanup */ // Enable debug prints to serial monitor #define MY_DEBUG #define MY_NODE_ID 13 // fixed node number // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 #include <SPI.h> #include <MySensor.h> // stepper library #include <AccelStepper.h> // http://www.airspayce.com/mikem/arduino/AccelStepper/ #define HALFSTEP 8 // Stepper uses "Halfstep" mode // button library // used for: // - manual open close - single click: close/ stop/ open/ stop // - calibration - after long press: open calibarion- until single press - closed calibration - until single press (stop) #include <Button.h> // https://github.com/JChristensen/Button #define CHILD_ID 1 // Id of the sensor child #define SN "Curtain control 13" #define SV "1.0" #define buttonPin1 7 // Arduino pin connected to buttonPin1 #define buttonPin2 A0 // Arduino pin connected to buttonPin2 (fixed to ground) // Motor pin definitions #define motorPin1 3 // IN1 on the ULN2003 driver 1 #define motorPin2 4 // IN2 on the ULN2003 driver 1 #define motorPin3 5 // IN3 on the ULN2003 driver 1 #define motorPin4 6 // IN4 on the ULN2003 driver 1 const unsigned long heartbeatInterval = 1 * 3600UL * 1000UL ; // heartbeatinterval unsigned long heartbeatCounter = 0 ; // // helper routines to store and retrieve long in mysensors EEPROM union { // used to convert long to bytes for EEPROM storage long longInt; uint8_t LongByte[4]; } convLongInt ; void saveStateL(int EEposition, long StateL){ convLongInt.longInt = StateL ; for (int y = 0; y < 4 ; y++){ // convert to bytes saveState(EEposition + y , convLongInt.LongByte[y]) ; } Serial.print("State saved: "); Serial.println(StateL); } long loadStateL(int EEposition){ for (int y = 0; y < 4 ; y++){ // convert from bytes convLongInt.LongByte[y] = loadState(EEposition + y) ; } Serial.print("State read: "); Serial.println(convLongInt.longInt); return convLongInt.longInt ; } // Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper with 28BYJ-48 AccelStepper stepper1(HALFSTEP, motorPin1, motorPin3, motorPin2, motorPin4); // Initialize button active low, debounce and internal pull-up Button myBtn(buttonPin1, true, true, 40); // Initiate the button (pin, pull_up, invert, debounce_ms) MyMessage percentageMsg(CHILD_ID, V_PERCENTAGE); // used to send updates to controller const long maxRun = 4000000L ; // maximum runway long setPosition = 0 ; // remembers set position, need to be saved in EEPROM const int setPositionEE = 4 ; // eeprom location long openPosition = 0 ; // Position at open, need to be saved in EEPROM? const int openPositionEE = setPositionEE + 4 ; // eeprom location long closedPosition = 120000UL ; // Position at full close, need to be saved in EEPROM const int closedPositionEE = openPositionEE + 4 ; // eeprom location unsigned long idleTimer = millis() ; // return to idle timer unsigned long idleTime = 100000UL ; // return to idle after 100 secs unsigned long printTimer = millis() ; // print timer unsigned long printTime = 1000UL ; // print after 1 secs enum position_t {Open, Close, Idle, Running} ; position_t lastDirection = Open ; // lastDirection only for buttonpress position_t runStatus = Idle ; // indicates current status for running motor. used for status reporting to controller enum State_t {sIdle, sCalibrateOpen, sCalibrateClose} ; State_t State = sIdle ; void setup() { // setup buttons pinMode(buttonPin1, OUTPUT); stepper1.setMaxSpeed(2000.0); stepper1.setAcceleration(1000.0); //saveStateL(closedPositionEE, closedPosition) ; // INIT: save closed position in EEPROM closedPosition = loadStateL(closedPositionEE) ; // need to get last values from EEPROM and assume the current position is correct setPosition = loadStateL(setPositionEE) ; stepper1.setCurrentPosition(setPosition ); }//--(end setup )--- void presentation() { present(CHILD_ID, S_COVER, "Curtain"); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP // Register the LED Dimmable Light with the gateway sendSketchInfo(SN, SV); } void loop() { unsigned int now = millis() ; // current time for loop // simple state machine for button press myBtn.read(); switch (State) { // Idle state, waiting for some action // - button press // - idleTimer case sIdle: if (myBtn.wasReleased()){ // idle Serial.println("Button release") ; // if running stop if (stepper1.isRunning()){ setPosition = stepper1.currentPosition(); stepper1.moveTo(setPosition) ; // move to current position (was already there..) } else if (lastDirection == Open) { stepper1.moveTo(closedPosition) ; lastDirection = Close ; } else { // lastDirection == Close stepper1.moveTo(openPosition) ; lastDirection = Open ; } } else if (myBtn.pressedFor(3000)){ // move to calibratete state with long press Serial.println("Button press long") ; idleTimer = now ; // return to idle after ... State = sCalibrateOpen ; stepper1.move(-maxRun) ; // let the stepper open with maximum } break ; // if not running and last action was open close ; else open // if longpress Calibrate open case sCalibrateOpen: // calibration going on if (myBtn.wasPressed()){ stepper1.setCurrentPosition(0 ); // set new 0 position ?? openPosition = setPosition = 0 ; State = sCalibrateClose ; // next is close calibarion stepper1.move(maxRun) ; // let the stepper close with maximum } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; case sCalibrateClose: // calibrate closed position, end with keypress if (myBtn.wasPressed()) { closedPosition = setPosition = stepper1.currentPosition() ; saveStateL(closedPositionEE, closedPosition) ; // save closed position in EEPROM State = sIdle ; stepper1.moveTo(openPosition) ; // return to open after calibration } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; default : break ; } // power off stepper if not running (no need to reenable)) if (!stepper1.isRunning()){ if (runStatus != Idle){ // there was a change in runningstatus, so report to controller setPosition = stepper1.currentPosition() ; // store in EEPROM and report ready to controller saveStateL(setPositionEE, setPosition) ; send( percentageMsg.set((100 * setPosition)/(closedPosition - openPosition))) ; runStatus = Idle ; } stepper1.disableOutputs(); } else { runStatus = Running ; } stepper1.run(); /* if (printTimer++ > now + printTime){ printTimer = now ; Serial.println(stepper1.currentPosition()); } */ } // This is called when a message is received void receive(const MyMessage &message) { // We only expect few types of messages from controller, check which switch (message.type) { case V_PERCENTAGE: // Curtain should be opened stepper1.moveTo(message.getInt() * (closedPosition - openPosition)/100); Serial.print("Message: "); Serial.print(message.sensor); Serial.print(" , value: % "); Serial.println( message.getInt()); Serial.print("Moving to: "); Serial.println(message.getInt() * (closedPosition - openPosition)/100); break ; case V_STATUS: // Curtain should be opened or closed full stepper1.moveTo((message.getInt() == HIGH)?openPosition:closedPosition); Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(" , value: % "); break ; default : // not recognizable message Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Unrecognized "); break ; } } -
@patchmaster This is my current curtain control sketch. I work with the development branch, so the syntax can be a little different.
The Accelstepper library gives you all the abilities to slow start/stop with numerous kinds of steppers.
My sketch includes a calibration function (stored in EEPROM) so the you don't need end stop detection (a stepper knows where it is)/* PROJECT: MY Sensors curtain controller PROGRAMMER: AWI DATE: march 11, 2016 FILE: AWI stepper1.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 (Development) Special: uses AccelStepper library Summary: Curtain control with stepper motor. Manual operation with 1 push button Calibration with manual button Remarks: Fixed node-id Change log: 20160312 - Cleanup */ // Enable debug prints to serial monitor #define MY_DEBUG #define MY_NODE_ID 13 // fixed node number // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 #include <SPI.h> #include <MySensor.h> // stepper library #include <AccelStepper.h> // http://www.airspayce.com/mikem/arduino/AccelStepper/ #define HALFSTEP 8 // Stepper uses "Halfstep" mode // button library // used for: // - manual open close - single click: close/ stop/ open/ stop // - calibration - after long press: open calibarion- until single press - closed calibration - until single press (stop) #include <Button.h> // https://github.com/JChristensen/Button #define CHILD_ID 1 // Id of the sensor child #define SN "Curtain control 13" #define SV "1.0" #define buttonPin1 7 // Arduino pin connected to buttonPin1 #define buttonPin2 A0 // Arduino pin connected to buttonPin2 (fixed to ground) // Motor pin definitions #define motorPin1 3 // IN1 on the ULN2003 driver 1 #define motorPin2 4 // IN2 on the ULN2003 driver 1 #define motorPin3 5 // IN3 on the ULN2003 driver 1 #define motorPin4 6 // IN4 on the ULN2003 driver 1 const unsigned long heartbeatInterval = 1 * 3600UL * 1000UL ; // heartbeatinterval unsigned long heartbeatCounter = 0 ; // // helper routines to store and retrieve long in mysensors EEPROM union { // used to convert long to bytes for EEPROM storage long longInt; uint8_t LongByte[4]; } convLongInt ; void saveStateL(int EEposition, long StateL){ convLongInt.longInt = StateL ; for (int y = 0; y < 4 ; y++){ // convert to bytes saveState(EEposition + y , convLongInt.LongByte[y]) ; } Serial.print("State saved: "); Serial.println(StateL); } long loadStateL(int EEposition){ for (int y = 0; y < 4 ; y++){ // convert from bytes convLongInt.LongByte[y] = loadState(EEposition + y) ; } Serial.print("State read: "); Serial.println(convLongInt.longInt); return convLongInt.longInt ; } // Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper with 28BYJ-48 AccelStepper stepper1(HALFSTEP, motorPin1, motorPin3, motorPin2, motorPin4); // Initialize button active low, debounce and internal pull-up Button myBtn(buttonPin1, true, true, 40); // Initiate the button (pin, pull_up, invert, debounce_ms) MyMessage percentageMsg(CHILD_ID, V_PERCENTAGE); // used to send updates to controller const long maxRun = 4000000L ; // maximum runway long setPosition = 0 ; // remembers set position, need to be saved in EEPROM const int setPositionEE = 4 ; // eeprom location long openPosition = 0 ; // Position at open, need to be saved in EEPROM? const int openPositionEE = setPositionEE + 4 ; // eeprom location long closedPosition = 120000UL ; // Position at full close, need to be saved in EEPROM const int closedPositionEE = openPositionEE + 4 ; // eeprom location unsigned long idleTimer = millis() ; // return to idle timer unsigned long idleTime = 100000UL ; // return to idle after 100 secs unsigned long printTimer = millis() ; // print timer unsigned long printTime = 1000UL ; // print after 1 secs enum position_t {Open, Close, Idle, Running} ; position_t lastDirection = Open ; // lastDirection only for buttonpress position_t runStatus = Idle ; // indicates current status for running motor. used for status reporting to controller enum State_t {sIdle, sCalibrateOpen, sCalibrateClose} ; State_t State = sIdle ; void setup() { // setup buttons pinMode(buttonPin1, OUTPUT); stepper1.setMaxSpeed(2000.0); stepper1.setAcceleration(1000.0); //saveStateL(closedPositionEE, closedPosition) ; // INIT: save closed position in EEPROM closedPosition = loadStateL(closedPositionEE) ; // need to get last values from EEPROM and assume the current position is correct setPosition = loadStateL(setPositionEE) ; stepper1.setCurrentPosition(setPosition ); }//--(end setup )--- void presentation() { present(CHILD_ID, S_COVER, "Curtain"); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP // Register the LED Dimmable Light with the gateway sendSketchInfo(SN, SV); } void loop() { unsigned int now = millis() ; // current time for loop // simple state machine for button press myBtn.read(); switch (State) { // Idle state, waiting for some action // - button press // - idleTimer case sIdle: if (myBtn.wasReleased()){ // idle Serial.println("Button release") ; // if running stop if (stepper1.isRunning()){ setPosition = stepper1.currentPosition(); stepper1.moveTo(setPosition) ; // move to current position (was already there..) } else if (lastDirection == Open) { stepper1.moveTo(closedPosition) ; lastDirection = Close ; } else { // lastDirection == Close stepper1.moveTo(openPosition) ; lastDirection = Open ; } } else if (myBtn.pressedFor(3000)){ // move to calibratete state with long press Serial.println("Button press long") ; idleTimer = now ; // return to idle after ... State = sCalibrateOpen ; stepper1.move(-maxRun) ; // let the stepper open with maximum } break ; // if not running and last action was open close ; else open // if longpress Calibrate open case sCalibrateOpen: // calibration going on if (myBtn.wasPressed()){ stepper1.setCurrentPosition(0 ); // set new 0 position ?? openPosition = setPosition = 0 ; State = sCalibrateClose ; // next is close calibarion stepper1.move(maxRun) ; // let the stepper close with maximum } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; case sCalibrateClose: // calibrate closed position, end with keypress if (myBtn.wasPressed()) { closedPosition = setPosition = stepper1.currentPosition() ; saveStateL(closedPositionEE, closedPosition) ; // save closed position in EEPROM State = sIdle ; stepper1.moveTo(openPosition) ; // return to open after calibration } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; default : break ; } // power off stepper if not running (no need to reenable)) if (!stepper1.isRunning()){ if (runStatus != Idle){ // there was a change in runningstatus, so report to controller setPosition = stepper1.currentPosition() ; // store in EEPROM and report ready to controller saveStateL(setPositionEE, setPosition) ; send( percentageMsg.set((100 * setPosition)/(closedPosition - openPosition))) ; runStatus = Idle ; } stepper1.disableOutputs(); } else { runStatus = Running ; } stepper1.run(); /* if (printTimer++ > now + printTime){ printTimer = now ; Serial.println(stepper1.currentPosition()); } */ } // This is called when a message is received void receive(const MyMessage &message) { // We only expect few types of messages from controller, check which switch (message.type) { case V_PERCENTAGE: // Curtain should be opened stepper1.moveTo(message.getInt() * (closedPosition - openPosition)/100); Serial.print("Message: "); Serial.print(message.sensor); Serial.print(" , value: % "); Serial.println( message.getInt()); Serial.print("Moving to: "); Serial.println(message.getInt() * (closedPosition - openPosition)/100); break ; case V_STATUS: // Curtain should be opened or closed full stepper1.moveTo((message.getInt() == HIGH)?openPosition:closedPosition); Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(" , value: % "); break ; default : // not recognizable message Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Unrecognized "); break ; } }@AWI Thanks. I have been using the Accelstepper library, but this has already given me several other ideas.
I appreciate the help. -
@patchmaster This is my current curtain control sketch. I work with the development branch, so the syntax can be a little different.
The Accelstepper library gives you all the abilities to slow start/stop with numerous kinds of steppers.
My sketch includes a calibration function (stored in EEPROM) so the you don't need end stop detection (a stepper knows where it is)/* PROJECT: MY Sensors curtain controller PROGRAMMER: AWI DATE: march 11, 2016 FILE: AWI stepper1.ino LICENSE: Public domain Hardware: ATMega328p board w/ NRF24l01 and MySensors 2.0 (Development) Special: uses AccelStepper library Summary: Curtain control with stepper motor. Manual operation with 1 push button Calibration with manual button Remarks: Fixed node-id Change log: 20160312 - Cleanup */ // Enable debug prints to serial monitor #define MY_DEBUG #define MY_NODE_ID 13 // fixed node number // Enable and select radio type attached #define MY_RADIO_NRF24 //#define MY_RADIO_RFM69 #include <SPI.h> #include <MySensor.h> // stepper library #include <AccelStepper.h> // http://www.airspayce.com/mikem/arduino/AccelStepper/ #define HALFSTEP 8 // Stepper uses "Halfstep" mode // button library // used for: // - manual open close - single click: close/ stop/ open/ stop // - calibration - after long press: open calibarion- until single press - closed calibration - until single press (stop) #include <Button.h> // https://github.com/JChristensen/Button #define CHILD_ID 1 // Id of the sensor child #define SN "Curtain control 13" #define SV "1.0" #define buttonPin1 7 // Arduino pin connected to buttonPin1 #define buttonPin2 A0 // Arduino pin connected to buttonPin2 (fixed to ground) // Motor pin definitions #define motorPin1 3 // IN1 on the ULN2003 driver 1 #define motorPin2 4 // IN2 on the ULN2003 driver 1 #define motorPin3 5 // IN3 on the ULN2003 driver 1 #define motorPin4 6 // IN4 on the ULN2003 driver 1 const unsigned long heartbeatInterval = 1 * 3600UL * 1000UL ; // heartbeatinterval unsigned long heartbeatCounter = 0 ; // // helper routines to store and retrieve long in mysensors EEPROM union { // used to convert long to bytes for EEPROM storage long longInt; uint8_t LongByte[4]; } convLongInt ; void saveStateL(int EEposition, long StateL){ convLongInt.longInt = StateL ; for (int y = 0; y < 4 ; y++){ // convert to bytes saveState(EEposition + y , convLongInt.LongByte[y]) ; } Serial.print("State saved: "); Serial.println(StateL); } long loadStateL(int EEposition){ for (int y = 0; y < 4 ; y++){ // convert from bytes convLongInt.LongByte[y] = loadState(EEposition + y) ; } Serial.print("State read: "); Serial.println(convLongInt.longInt); return convLongInt.longInt ; } // Initialize with pin sequence IN1-IN3-IN2-IN4 for using the AccelStepper with 28BYJ-48 AccelStepper stepper1(HALFSTEP, motorPin1, motorPin3, motorPin2, motorPin4); // Initialize button active low, debounce and internal pull-up Button myBtn(buttonPin1, true, true, 40); // Initiate the button (pin, pull_up, invert, debounce_ms) MyMessage percentageMsg(CHILD_ID, V_PERCENTAGE); // used to send updates to controller const long maxRun = 4000000L ; // maximum runway long setPosition = 0 ; // remembers set position, need to be saved in EEPROM const int setPositionEE = 4 ; // eeprom location long openPosition = 0 ; // Position at open, need to be saved in EEPROM? const int openPositionEE = setPositionEE + 4 ; // eeprom location long closedPosition = 120000UL ; // Position at full close, need to be saved in EEPROM const int closedPositionEE = openPositionEE + 4 ; // eeprom location unsigned long idleTimer = millis() ; // return to idle timer unsigned long idleTime = 100000UL ; // return to idle after 100 secs unsigned long printTimer = millis() ; // print timer unsigned long printTime = 1000UL ; // print after 1 secs enum position_t {Open, Close, Idle, Running} ; position_t lastDirection = Open ; // lastDirection only for buttonpress position_t runStatus = Idle ; // indicates current status for running motor. used for status reporting to controller enum State_t {sIdle, sCalibrateOpen, sCalibrateClose} ; State_t State = sIdle ; void setup() { // setup buttons pinMode(buttonPin1, OUTPUT); stepper1.setMaxSpeed(2000.0); stepper1.setAcceleration(1000.0); //saveStateL(closedPositionEE, closedPosition) ; // INIT: save closed position in EEPROM closedPosition = loadStateL(closedPositionEE) ; // need to get last values from EEPROM and assume the current position is correct setPosition = loadStateL(setPositionEE) ; stepper1.setCurrentPosition(setPosition ); }//--(end setup )--- void presentation() { present(CHILD_ID, S_COVER, "Curtain"); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP // Register the LED Dimmable Light with the gateway sendSketchInfo(SN, SV); } void loop() { unsigned int now = millis() ; // current time for loop // simple state machine for button press myBtn.read(); switch (State) { // Idle state, waiting for some action // - button press // - idleTimer case sIdle: if (myBtn.wasReleased()){ // idle Serial.println("Button release") ; // if running stop if (stepper1.isRunning()){ setPosition = stepper1.currentPosition(); stepper1.moveTo(setPosition) ; // move to current position (was already there..) } else if (lastDirection == Open) { stepper1.moveTo(closedPosition) ; lastDirection = Close ; } else { // lastDirection == Close stepper1.moveTo(openPosition) ; lastDirection = Open ; } } else if (myBtn.pressedFor(3000)){ // move to calibratete state with long press Serial.println("Button press long") ; idleTimer = now ; // return to idle after ... State = sCalibrateOpen ; stepper1.move(-maxRun) ; // let the stepper open with maximum } break ; // if not running and last action was open close ; else open // if longpress Calibrate open case sCalibrateOpen: // calibration going on if (myBtn.wasPressed()){ stepper1.setCurrentPosition(0 ); // set new 0 position ?? openPosition = setPosition = 0 ; State = sCalibrateClose ; // next is close calibarion stepper1.move(maxRun) ; // let the stepper close with maximum } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; case sCalibrateClose: // calibrate closed position, end with keypress if (myBtn.wasPressed()) { closedPosition = setPosition = stepper1.currentPosition() ; saveStateL(closedPositionEE, closedPosition) ; // save closed position in EEPROM State = sIdle ; stepper1.moveTo(openPosition) ; // return to open after calibration } else if (now > idleTimer + idleTime) { // timer expired -> abort calibration State = sIdle ; } break ; default : break ; } // power off stepper if not running (no need to reenable)) if (!stepper1.isRunning()){ if (runStatus != Idle){ // there was a change in runningstatus, so report to controller setPosition = stepper1.currentPosition() ; // store in EEPROM and report ready to controller saveStateL(setPositionEE, setPosition) ; send( percentageMsg.set((100 * setPosition)/(closedPosition - openPosition))) ; runStatus = Idle ; } stepper1.disableOutputs(); } else { runStatus = Running ; } stepper1.run(); /* if (printTimer++ > now + printTime){ printTimer = now ; Serial.println(stepper1.currentPosition()); } */ } // This is called when a message is received void receive(const MyMessage &message) { // We only expect few types of messages from controller, check which switch (message.type) { case V_PERCENTAGE: // Curtain should be opened stepper1.moveTo(message.getInt() * (closedPosition - openPosition)/100); Serial.print("Message: "); Serial.print(message.sensor); Serial.print(" , value: % "); Serial.println( message.getInt()); Serial.print("Moving to: "); Serial.println(message.getInt() * (closedPosition - openPosition)/100); break ; case V_STATUS: // Curtain should be opened or closed full stepper1.moveTo((message.getInt() == HIGH)?openPosition:closedPosition); Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(" , value: % "); break ; default : // not recognizable message Serial.print("Message - valid: "); Serial.print(message.sensor); Serial.print(", Unrecognized "); break ; } }@AWI
I have been searching for something like this for a while, thank you for the code!But i have some problems compiling it :\
C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'void saveStateL(int, long int)': stepper_mysensor:74: error: 'saveState' was not declared in this scope saveState(EEposition + y , convLongInt.LongByte[y]) ; ^ C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'long int loadStateL(int)': stepper_mysensor:81: error: 'loadState' was not declared in this scope convLongInt.LongByte[y] = loadState(EEposition + y) ; ^ C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'void presentation()': stepper_mysensor:129: error: 'present' was not declared in this scope present(CHILD_ID, S_COVER, "Curtain"); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP ^ stepper_mysensor:132: error: 'sendSketchInfo' was not declared in this scope sendSketchInfo(SN, SV); ^ C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'void loop()': stepper_mysensor:195: error: 'send' was not declared in this scope send( percentageMsg.set((100 * setPosition)/(closedPosition - openPosition))) ; ^ exit status 1 'saveState' was not declared in this scope``` -
@AWI
I have been searching for something like this for a while, thank you for the code!But i have some problems compiling it :\
C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'void saveStateL(int, long int)': stepper_mysensor:74: error: 'saveState' was not declared in this scope saveState(EEposition + y , convLongInt.LongByte[y]) ; ^ C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'long int loadStateL(int)': stepper_mysensor:81: error: 'loadState' was not declared in this scope convLongInt.LongByte[y] = loadState(EEposition + y) ; ^ C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'void presentation()': stepper_mysensor:129: error: 'present' was not declared in this scope present(CHILD_ID, S_COVER, "Curtain"); // Window Cover sub-type, commands: V_UP, V_DOWN, V_STOP ^ stepper_mysensor:132: error: 'sendSketchInfo' was not declared in this scope sendSketchInfo(SN, SV); ^ C:\Users\ToreR\Documents\Arduino\stepper_mysensor\stepper_mysensor.ino: In function 'void loop()': stepper_mysensor:195: error: 'send' was not declared in this scope send( percentageMsg.set((100 * setPosition)/(closedPosition - openPosition))) ; ^ exit status 1 'saveState' was not declared in this scope```@Tore-André-Rosander are you using the development branch? The errors seem to indicate that is the case.
-
@Tore-André-Rosander are you using the development branch? The errors seem to indicate that is the case.
@AWI Thank you, that helped :)
I now have it up and running.But how do i connect and use this with a controller (like Domoticz)?
I use an ESP gateway (from the dev branch) and the curtain node is connected and showing up in domoticz.
But how do i make domoticz send commands to the curtain node?All i get when adding the curtain node both as on/off button and blinds in domoticz is "unreconized" in the curtain serial monoitor.
-
@AWI Thank you, that helped :)
I now have it up and running.But how do i connect and use this with a controller (like Domoticz)?
I use an ESP gateway (from the dev branch) and the curtain node is connected and showing up in domoticz.
But how do i make domoticz send commands to the curtain node?All i get when adding the curtain node both as on/off button and blinds in domoticz is "unreconized" in the curtain serial monoitor.
@Tore-André-Rosander I have defined it as "Blinds Percentage" in Domoticz. This send the V_STATUS and V_PERCENTAGE messages where the node should respond to...
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login