Hello,
finally, ... I had time to test the "Option 2".
Because the stock of all shops are empty, I used my old RPI 3 B+. But after all, the CPU runs at 50%. Even the 1 GB ram is half free.
The way wasn't as easy as I thought. But now the setup runs pretty good.
This steps I had to make:
A fresh install of Raspian Lite (I used 64-Bit, if this is needed? I dont know)
Installed "Home Assistant Supervised", which runs in a docker. (I found a tutorial based on this informations: https://github.com/home-assistant/supervised-installer)
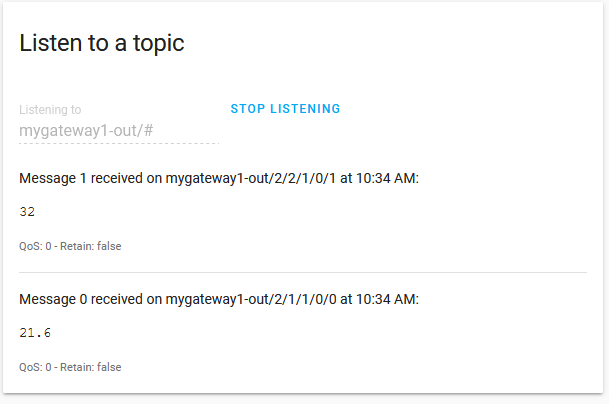
Installed the MySensors Gateway with some changes! (https://www.mysensors.org/build/raspberry)
3b. The manual works fine for 32 Bit raspbian. For 64 Bit you have to edit two files bevor the compile starts. (https://forum.mysensors.org/topic/11456/is-mysensors-rpi-gw-32bit-only/8)
In my case i have to change the section for the BCM2837 (= RPI3) as described in the post.
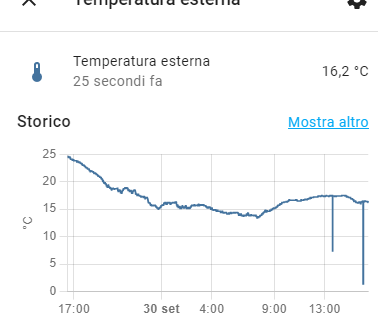
Now, I have a clean setup for my smarthome with MySensors Nodes and Zigbee Nodes.
[image: SmartHomeRaspi.jpg]
The RFM69 ist directly connected to the GPIO of the PI.
The power consumption is araound 2 W. Somewhat lower when idle.