Sensebender Micro
-
Did someone "test" the humidity precision of the Si7021on the sensbender? Of corse the datasheet says max 3% off but how reliable is that?
I have other sensors here and they differ by about 10%. So I did a "Salt-Calibration-Test" and there my two sensbenders or better Si7021 are 6% over the reference value. They report 81% and it should be 75%.
Note: It's my first time that I performed this test and I'm not 100% sure that the (water-salt-ratio) is correct - thats why I'm interested if someone else tested the values?
-
Salt and electronics isn't a good combination, it will cause corrosion of the copper tracks..
Just to warn you a little bit
")
-
@tbowmo Thanks. No worries the electronic won't touch the salt or water. The salt/water is just within the same closed container to bring the enclosed air to exactly 75.3% rel hum (at 25C).
I followed this howto: But there are many other similar ones.
http://www.kingofthehouse.com/hygrometer/
-
@nivoc I setup several sensebenders on battery last summer and noticed they were a few % below two dht22 I had been running for months. I did the saturated salt test on three sensebenders with one dht22 and one mechanical hygrometer and the sensebenders all read 74-75% while the DHT and hygrometer read 78-80%. Not a perfect test and i dont know which devices were correct but one thing I noticed was the sensebenders consistently provided the same result across different devices. Relative humidity is relative.
-
@Dwalt
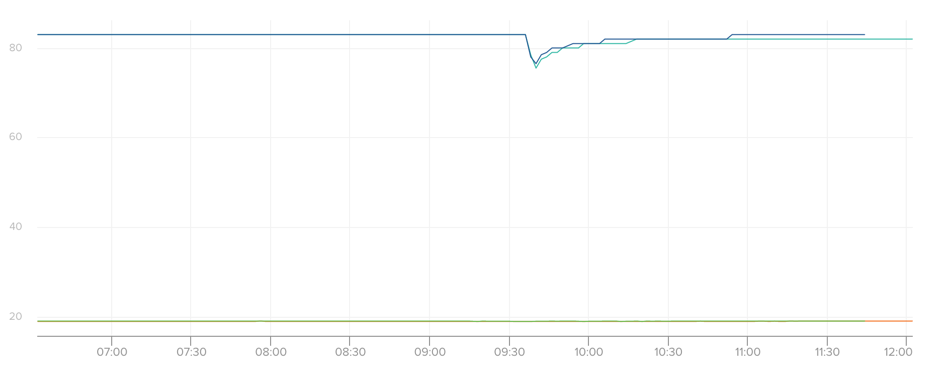
Thanks for the info. I'm currently opening the box every several hours to test the salt soup. My room has something between 50 and 60 rel. (so below 75). And every time I open the box this (see pic). It drops and goes back up to 82 or 83. Than it stabilizes there over the next couple hours. There are two sensbenders in the box - thats what the two line are. And yes they are remarkable equal. But it always goes to 82 - i would hope for 75. But I will repeat this procedure until it starts to stabilizes after every opening a little bit below the value that was there before the opening. Because if that happens i am below the dry point and than I will test in a room with humidity higher than 80 and test if soup can do the same into the other direction and holds it stable for many openings. THAN i know that the salt is performing is job correctly and know that the test is good and the senbender is wrong or hopefully I learn the opposite.
-
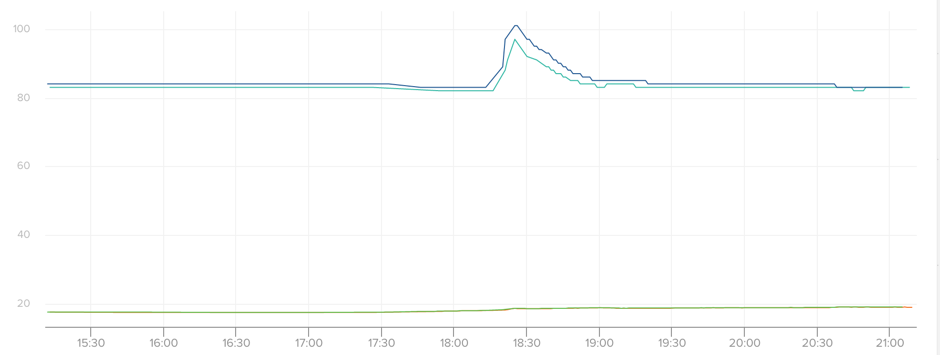
Yes it looks like that the sensors are 8% off. I tested the other way around >opening at ~100rel and closing and same + exactly back to 82/83 and it should be 75% :-).
-
In the new year I will test with "Magnesium chloride". It brings the rel humitity to exactly 32% - I will report how that goes
-
If the Si7021 is exposed to high humidity for a prolonged period, the RH% measurement will shift upwards, according to the datasheet, page 15, section 4.3
Extract from Datasheet:
4.3. Prolonged Exposure to High Humidity
Prolonged exposure to high humidity will result in a gradual upward drift of the RH reading. The shift in sensor
reading resulting from this drift will generally disappear slowly under normal ambient conditions. The amount of
shift is proportional to the magnitude of relative humidity and the length of exposure. In the case of lengthy
exposure to high humidity, some of the resulting shift may persist indefinitely under typical conditions. It is generally
possible to substantially reverse this affect by baking the device (see Section “4.6. Bake/Hydrate Procedure” ).
-
@petoulachi said:
BTW, what is the F() function ? instead of Serial.print("Sensebender Micro FW "); why using Serial.print(F("Sensebender Micro FW ")); ?
It's a way to save some RAM. A simple string constant like "Hello" takes up 6 bytes of RAM and also 6 bytes of Flash (program) memory (6 bytes includes a single "hidden" byte of binary zero as an end-of-text marker). At startup and before your code executes, that bit of program memory is copied to RAM. The F() thing is a "macro" which causes the compiler save only the 6 bytes of Flash (no Ram used). The print function can (through C++ typing) fetch those 6 bytes from Flash at runtime for printing. If you have long or many text constants in your program, this can add up to some useful savings,when you only have 2K of RAM.
See the "F() Macro" on this page: https://www.arduino.cc/en/Reference/PROGMEM
-
@tbowmo Good hint. But it is happening to all three sensbeners for at least one month now. (different orders). I now got 4 more so I will test again soon.
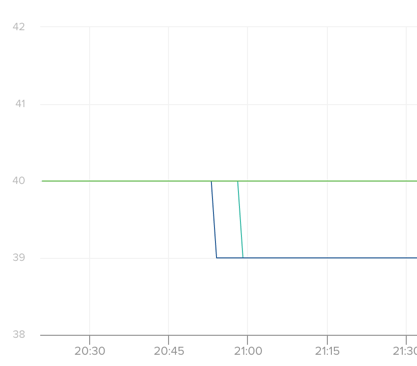
Over xmas I tested also with magnesium chloride hexahydrate. magnesium chloride hexahydrate produces exactly 33%rel.
All 3 sensbenders report exactly 39% or 40%. So they are also here 7% off. But almost the same value and very reproducible - so thats great!
-
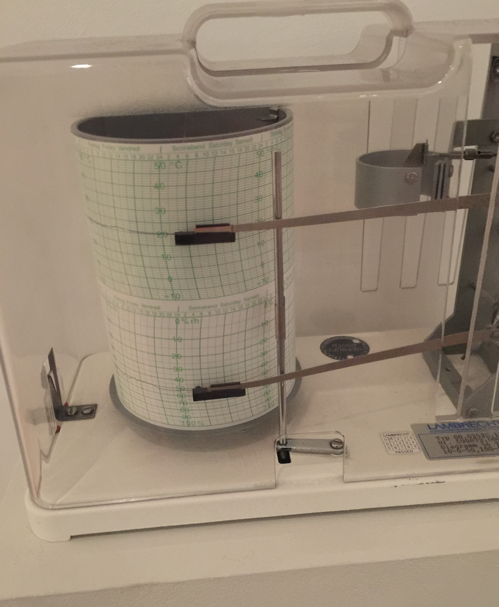
@tbowmo I'm now almost sure that my test-setup has no faults very reproducable and read many articles - I plan to verify my findings with someone who has a professional calibrated device.
I saw in a museum nearby that they have professional calibrated devices
So I will test against those
-
Have you tried to "bake" your sensebenders, in case they have been exposed to high humidity for a longer time?
They are, as far as I know, produced in a part of China, which are known to have very high humidity. (been traveling there a lot some years ago)
-
@nivoc
I can confirm your results: I am running two different sensors in the same room next to each other. The sensebender is always above the dht-22. Right now it is
52% to 47.8% rel. humidity, while the temperature is 17.8 to 17.9 (which is nearly equal).
-
@tbowmo No I haven't baked yet. I will try that but not in the next two weeks. But I will report back.
-
But I tested tonight with distilled water - so should be exactly 100%. And again (I didn't know that thats possible) I got 104 and 107% so slightly above (still increasing). Thats great b/c that means all values are about 7-8% too high.
At 33% the reading was about 40%
At 75% the reading was about 83%
At 100% the reading was about 106%So reading minus 8% gives a pretty accurate result. In the next few days i will test 3 more sensbender.
Distilled Water (100% expected):
-
Read the spec for the humidity sensor used in the sensebender (Si7021 integrated humidity / temperature sensor.)
Precision Relative Humidity Sensor: ± 3% RH (max), 0–80% RH
To my reading this is actually 6% wrong reading to one of the sides - so when you are measuring yours to be 8% off, is caused that you are using the device outside of humidity range 100% and max is 80%Link to spec:
https://www.silabs.com/Support Documents/TechnicalDocs/Si7021-A20.pdfWhat I want you to know, if your device is reading within 6 % of the value - it's still reading correct. and when you compare ex DHT22 that device also have some reading variation error. Do not expect to get 100% perfect value for 2 devices...
-
@bjacobse Yes and no
Yes 100% is outside of the spec.
And no. 33% with Magnesium Chloride Hexahydrate is inside the spec and I get 40% instead of 33-34%.
Max off should be 3% above or? Means 37% - but fair enough. Should be ok for household use.
-
@nivoc said:
@bjacobse Yes and no
Yes 100% is outside of the spec.
And no. 33% with Magnesium Chloride Hexahydrate is inside the spec and I get 40% instead of 33-34%.
Max off should be 3% above or? Means 37% - but fair enough. Should be ok for household use.
I hope the Temp measurements are not off by that much.
i don't need .00001 accuracy or anything. but i feel a big difference between 70 and 72 in my house.
-
@mvader
Spec is: High Accuracy Temperature Sensor ±0.4 °C (max), –10 to 85 °C
So the temp accuracy is quite good
-
@nivoc
Yes you are right, +-3 from your humidity solution on 33%, then the reading could be in the interval 33-3=30% or up to 33+3=36% and should not show 40%did you get same false readings from other sensebender humidity sensors?
-
@bjacobse Yes I have 3 sensbener running from 2 different orders. All 3 are very near by each other. So at 33% they all read something near to 40%.
I have 4 more sensbenders to build. However I continue to test tonight with a Boveda-Pack that claims to bring the hum in a containter to exactly 69%. I did 4 test's so far and also used different technics. So i get more and more confident.
But the very good thing is - it looks every reproducible. So the value may be off but reproducable accurate off by about 8%. When I completed my test it will be very easy to correct it within the software.
-
@mvader I haven't made any very accurate temp testings. But the readings are exactly the same than other non-sensbender devices in my home. I started researching the humidity b/c I had different readings between different devices.
Temp looks fine to me.
-
What is the current consumption of the Sensebender during sleep and active modes?
Thanks,
Tony
-
there are some measurements in the old design thread here http://forum.mysensors.org/topic/510/minimal-design-thoughts
-
Hi. What case you all using for the sensebender ?Any good idea.
-



-
Where did you find that box?
-
Got it from http://cpc.farnell.com/1/1/57932-evatron-pp42m-case-sensor-ivory-71x71x27mm.html.
Not the cheapest, but definitely worth the money as it is very good quality. There are other colours available (white and black) https://www.jprelec.co.uk/store.asp/c=552/Gas-Sensor-Case
-
@tbowmo: I have some of these too, it's nice box. i got these from tme. cheaper
http://www.tme.eu/fr/details/box-sens-white/boitiers-dappar-dalarme-et-de-capt/supertronic/
-
Hello @tbowmo
Doesn't the atmega328 has only 2 pins which are D2 and D3 from external interrupts ?
I am wondering why do we waste the usage of D2 since the IRQ pin is not used in the library ?
-
@ahmedadelhosni because it is not in use by the library <yet>. Would be a shame if the library some day gets updated with support for a radio that can enter low power sleep and still wake when needed.
-
What @Anticimex said.. And at the time when I created the sensebender, I didn't know that the interrupt wasn't used (I was relatively new to the project) so I thought that we had to have it connected..
-
It is used by the RF69, right @tbowmo? (when using adapter plate...)
-
@Anticimex @tbowmo This a valid point which I thought of but I needed two interrupt pins. As far as I knew from fast searching is that external interrupts which react to CHANGE in pin state are only valid for pins 2 and 3. Correct ?
Maybe there is another solution which I missed.
-
Yes, that's right, RFM69 is using interrupts.. (and rfm69 is possible on the sensebender using for example this pcb)
-
And with a scalpel and a soldering iron you should be able to use both interrupts by disconnecting the one reserved for nrf24. Of course that would disable the use for rfm69 om that board.
-
@Anticimex Yeah I could just connect my device to the atmega pin directly as I can see/find any pin header to route the interrupt pin 2. They are all used.
Thanks guys.
-
I just received two sensebenders. I'm really impressed by the great engineering behind the board. I can't wait to heat up my soldering iron. I love them!
-
I just received two Sensebenders, but have problems getting the device to consume little power. I get totally different values as displayed above.
With the following sketch, I get about 5,6mA in active state and 1,6mA in sleep mode with nRF24 attached. I have compared different nRF24-chips and this one consumed the least power.
Without the nRF24, I get 4mA and 0,025mA (=25µA) during sleep mode.
#include <LowPower.h> #include "RF24.h" RF24 radio(9, 10); void setup() { } void loop() { delay(8000); LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF); }
-
@user2334 I don't think the LowPower library shuts off the radio. Use MySensor's sleep function instead.
-
A general question regarding these types of boards that are generally designed to be used on battery power. Is there a reason to not power the ATSH204A and Si7021 from AVR pins? The pins can source far more than what these devices can sink (even when using the heating on the Si7021), and it would allow squeezing a tiny bit more out of the battery life by selectively powering down the devices.
Eg., if I'm not using the ATSHA204A at all, I can save 150nA continuous current. The power saving from disabling the Si7021 is less at about 60nA, so that might just be eaten up by having to wait up to 80ms before a full conversion.I'm aware that we're talking about saving a tiny ~200nA here, but over the span of two years that adds up to about 350mAh.
So what I'm wondering is simply, is there a technical reason saying that this really isn't a Good Idea (tm)? Should I avoid doing so if I design my own similar device?
-
@ximinez said:
A general question regarding these types of boards that are generally designed to be used on battery power. Is there a reason to not power the ATSH204A and Si7021 from AVR pins? The pins can source far more than what these devices can sink (even when using the heating on the Si7021), and it would allow squeezing a tiny bit more out of the battery life by selectively powering down the devices.
Eg., if I'm not using the ATSHA204A at all, I can save 150nA continuous current. The power saving from disabling the Si7021 is less at about 60nA, so that might just be eaten up by having to wait up to 80ms before a full conversion.I'm aware that we're talking about saving a tiny ~200nA here, but over the span of two years that adds up to about 350mAh.
So what I'm wondering is simply, is there a technical reason saying that this really isn't a Good Idea (tm)? Should I avoid doing so if I design my own similar device?
I second that question. I was just thinking about a similar idea.
-
That is indeed a good question. The straight answer is that I didn't think about that when I designed the board.
In theory you could also power the radio from a digital pin on the avr, and power that down completely.
BTW. If you turn on the heating element in the si7021 at full power, I think the power drain exceeds what the avr can deliver on a digital pin. But one could just avoid that.
-
I have been thinking about this as well. But I discarded parts of the idea because I needed the IO for other stuff (MYSX in my case). Instead I designed a switched rail where one could attach sensor power sinks. It's not io powered but it is io controlled.
Though I did not attach the si or atsha to this switch function as I decided to make it an optional feature but wanted to make sure authentication and temp/hum would always be available.
-
That is indeed a good question. The straight answer is that I didn't think about that when I designed the board.
Oh, I thought it was a design decision
In theory you could also power the radio from a digital pin on the avr, and power that down completely.
I've been wondering about the radio in particular. Does the radio keep any state locally, and will it have to be reinitialized upon powerup?
BTW. If you turn on the heating element in the si7021 at full power, I think the power drain exceeds what the avr can deliver on a digital pin. But one could just avoid that.
The heating element eats a measly 3.1mA according to the datasheet, so even that would be well within the limits for a single in on a 328p.
Now, I don't have Eagle installed on this laptop, and my bandwidth is limited right now. Is there a picture of the PCB traces available? Wondering if atleast some of this can be hacked on by cutting traces.
-
Nope, there are only the eagle design files.. (Or gerbers, you could use a gerber viewer)
I have 4 sensors operating for almost a year on two AA batteries, they all report around 73% battery left. So in my opinion, it's not that necessary to do extra optimization on the power drain..
-
@tbowmo
While 73% after one year is good, it doesn't mean that it can't get better. The ATSHA204a and Si7021 draw about 350mAh from the battery over two years from idling alone. The NRF24L01+ draws around 1500mAh.
Remember, you will never get close to emptying out the battery before the voltage drops below working voltage. Using alkaline batteries, you'll get around 2000mAh before the batteries reach 2v (which, if you're using battery voltage as a pure percentage, is 66%), at which point the voltage curve drops sharply - and your sensors die. The radio and sensors have drawn more than 900mAh from your battery during the year you have run the device (and that's just idling) - close to half your battery life.Assuming your battery percentage is correct, and you started at 100% one year ago, I'm betting your sensors will die sometime during this summer. While you may think that extra optimization isn't worth it, I do. The nanoAmp draws may not seem like much, but drawn out on a timescale like this, it is a major power draw.
-
@ximinez That depend on how you define battery percentage. I have chosen to adjust my measurements to let 0% mean when voltage drops below the highest requirements of the onboard devices. Since that particular device will fail when voltage goes lower, it serves no purpose to provide a false battery percentage. 0% is when the node no longer operates according to specs. But this is of course hw/sketch-dependent.
-
@Anticimex The point still stands however. The discharge graph is far from linear, and your sensors and radio have already drawn close to half of your battery life by idling alone. A colleague of mine has had to replace the batteries in his two sensors already.
-
-
@Anticimex Ah, yes. sed /your/@tbowmo's/g. I blame lack of caffeine.
-
@ximinez makes sense. I'm sure you can cut down on power consumption by cutting power to those peripherals. I do not know how signing would be affected by this though, as I have not tested it with switching the atsha on and off between calls. I would like to hear from you on that topic if you choose to try it though
-
Ok, I've been looking at the image and my spare sensor. It looks like:
Power to the NRF can be cut between C3 and VCC pin.
ATSHA204a power can be cut on the trace that goes from the atsha and beneath the flash.
Si7021 power can be cut at the trace that goes from C4.I just might have to dig out my scalpel and iron for this. If the components magically work without any extra initialization on powerup, modifying the code looks easy.
I'll report back with my findings
-
For my battery reporting, I have set 1.9V as 0%, 3.3V is 100%..
While you're at it, also power down the external flash, as it might also contribute a bit..
-
Well that went south pretty fast. Was wondering why my sensebender was acting up. Took a while to see that I had plugged in an ESP8266 module instead of one of my NRF24 modules. Those modules look far too much alike

Serial output now looks like this: "Sånsebåndåò Micro FW 1.3" with random characters corrupted. I think I've killed it
")
I can still flash firmware to it via serial, so it's not completely dead.I can however confirm that both the SHA204A and SI7021 self-tests OK being powered on in-sketch:
(Flash seems to randomly fail or test OK, not sure why yet)þSånseâånder Micòo F× 1.3 - TesôÍoäe
Tåstiîg påòipheraló!
-> ÓÉ7021 : ok!
-> Æìasè : æailed!
-> SÈA204 : Ïk (seòéal : 01234ÂBAÅ259E8AÄÅE)
Tåót fiîésheä
----> Óelftest æaiìåä!
-
@ximinez If possible, try to check if signing and verification of signatures work as well. I have tried to implement the use of the ATSHA to be atomic in nature, but it could be that some state is retained which is cleared on power down which might break the calculations.
-
What is the easiest and fastest way to sign and verify? I don't have a gateway set up quite yet.
(And, is any part of setting this up dependent on serial integrity? If so I might have to adjust baud quite a bit)
-
@ximinez Well, without a gw the only option is to use node peer to peer transmissons to test signing. How to do it is described in the signing documentation, assuming you use development branch, you can see here. For master, look here.
-
I have an Uno with an ethernet shield and nrf24 hooked up, so I will have to get around to write a sketch for that purpose.
But to get signing to work, I'll have to personalize the atsha? That sketch doesn't compile for me.
-
Yes, you have to personalize it. What is failing? I don't have an Uno myself, but according to Jenkins the personalizer compiles ok for Uno on both master and development. You don't have any local changes?
-
The personalization fails to compile for my sensebender micro. There's a few undeclared:
Personalizer:225: error: 'EEPROM_SIGNING_SOFT_HMAC_KEY_ADDRESS' was not declared in this scope
Personalizer:225: error: 'hwReadConfigBlock' was not declared in this scope
Personalizer:236: error: 'EEPROM_SIGNING_SOFT_SERIAL_ADDRESS' was not declared in this scope
Personalizer:247: error: 'EEPROM_RF_ENCRYPTION_AES_KEY_ADDRESS' was not declared in this scope
Personalizer:697: error: 'hwMillis' was not declared in this scopeI'm trying to compile this against master however. Do I have to have dev branch to compile that sketch?
-
Fails with the same errors on Uno for me.
-
@ximinez and you are certain you have no local changes to the code? Jenkins builds both master and development branches every night for both the SenseBender and the uno and it builds all examples, including the personalizer without issues.
-
Pretty sure.
I'll wipe my library dir and redownload master.
-
If memory serves me, some of the errors you get seem to originate from code on development branch. The eeprom addresses are to my knowledge not yet available on master.
-
Ok, moved from master to dev. Sketch compiled. Not quite the output I expected however.
EEPROM configuration:
SOFT_HMAC_KEY | FFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFF
SOFT_SERIAL | FFFFFFFFFFFFFFFFFF
AES_KEY | FFFFFFFFFFFFFFFFFFFFFFFFFFFFFFFF
-
@ximinez it is the output I expected. You have gone for soft signing, and you see the reset values of the eeprom. You need to pick atsha settings. The link I gave you gives the exact settings to personalize both for software and atsha backends.
-
Got it now
I had two different sketches and had edited the wrong one. Now I have actual values.
Is there an example GW sketch that I can load quickly to my Uno/W5100 shield/NRF24?
-

I'm rusty on the gateways. But on development branch, configuring signing is easier than on master branch. My link gives the details on signing configuration for both nodes and gateways with examples.
-
Yeah, I'm struggling a bit with those instructions. I've set up my gateway with soft signing, and got sane values written to EEPROM.
Now, do I need any of the three values to personalize the sensebender?
SOFT_HMAC_KEY?
-
@ximinez the SenseBender you have patched/cut needs atsha personalization, so no SOFT anything. But you need to have the same hmac key stored on the atsha on the SenseBender as you have picked as soft hmac key in eeprom of your gateway (the node you have personalized for soft signing).
-
@Anticimex Yeah, that's what I asked
I get:
Writing key to slot 0...
Data lock failed. Response: D3
-
@ximinez locking data is a very bad idea. It will prevent you from changing the hmac key. You only need to (and should) lock configuration. Only lock data if you really know what you are doing.
-
Writing key to slot 0...
Data not locked. Define LOCK_DATA to lock for real.Personalization is now complete.
Configuration is LOCKED
Data is UNLOCKED
-
@ximinez looks good. You should be done with personalization. Remember to require signatures from the SenseBender in addition to "enabling" it. You can also require signature on the GW, thus forcing all communications between them to be signed. The serial console will reveal how it goes. You can enable verbose debug (MY_DEBUG_VERBOSE_SIGNING) for the signing if you want more details on the signing parts.
-
I have the sensor sketch mostly done, but I'll have to do some soldering again tomorrow. It looks like D7 got burnt when I plugged in my ESP8266, giving ~0,5v out on that pin. Will have to work around that:
Sôártinç óensor (RÎONA-, 2.0.0-beta)
Raäio init æáiìåd. Ãèeck wiring.When that is OK, I'll look at the GW sketch.
-
Sounds good. Bedtime here too.
-
D3, D4 and D7 are all funky, and do not give ~3v when set high. So I'm back to the radio being on all the time.
D5 and D6 mysteriously work just fine.Radio is now OK, but the sensebender reboots before it gets to setup().
Stárting óensor (ÒÎONA-, 2.0.0-beôá)
Ráäio init suããessæuì.
æéîä parenô
send: 255-255-255-255 s=255,c=3,t=7,pt=0,l=0,sg=0,óô=bc:
[reboot and repeat]
-
Sounds like it's on its way to the "other side"..
-
Yup. Setting up my other sensebender as a proper signing sensor and my uno as a gateway. This will have to wait until I get a couple more working sensors.
-
Ok. I set up my GW, and set up my healthy sensebender as an outdoor sensor. The zombie sensor is now a working indoor sensor.
I have enabled signing and set up whitelisting, but enabling signing debugging makes the sketch oversize, so I can't actually check if signing works - but atleast now I have two sensors.
-
You will still be notified without verbose logging. And if you have enabled and require signing, you won't get any data if something fails (assuming signing is properly activated).
-
@user2334 said:
I just received two Sensebenders, but have problems getting the device to consume little power. I get totally different values as displayed above.
With the following sketch, I get about 5,6mA in active state and 1,6mA in sleep mode with nRF24 attached. I have compared different nRF24-chips and this one consumed the least power.
Without the nRF24, I get 4mA and 0,025mA (=25µA) during sleep mode.
#include <LowPower.h> #include "RF24.h" RF24 radio(9, 10); void setup() { } void loop() { delay(8000); LowPower.powerDown(SLEEP_8S, ADC_OFF, BOD_OFF); }As a follow-up to my previous posting, I can confirm, that using original nRF24-modules (best source seems to be https://www.itead.cc/nrf24l01-module.html), I get 0,023mA (=23µA) with nrf24 attached during sleep mode (no difference between the libraries JeeLib->Sleepy::loseSomeTime or LowPower->LowPower.powerDown).
It is quite interesting, that so many nRF24 Modules (bought from eBay, from Amazon UK) are clones with higher power consumption. Some of them use 3mA, some have electrical short, ...
-
@Anticimex I've set MY_SIGNING_SOFT, MY_SIGNING_REQUEST_SIGNATURES and MY_SIGNING_NODE_WHITELIST on the GW, and reenabled (normal) debug but not signing debug since that is too big.
With those enabled, if the sending node does not sign, I should not get this?0;255;3;0;9;read: 2-2-0 s=1,c=1,t=0,pt=7,l=5,sg=0:6.3
0;255;3;0;9;read: 2-2-0 s=2,c=1,t=1,pt=2,l=2,sg=0:59
-
@ximinez The GW will only require signatures from a node that in turn require signatures.
It is the sg-flag that indicate if a message is signed, in your case, both messages are unsigned.
If you only have node->gw communication, both gw and node has to require signatures for you to see signed messages.
If you have gw->node communication, it is enough that the node require signatures, the gw will then sign them, no matter if the gw require signatures or not.
-
0;255;3;0;9;read: 3-3-0 s=1,c=0,t=6,pt=0,l=0,sg=0:
0;255;3;0;9;read: 3-3-0 s=2,c=3,t=16,pt=0,l=0,sg=0:
0;255;3;0;9;send: 0-0-3-3 s=255,c=3,t=17,pt=6,l=25,sg=0,st=ok:57ACB4BD46843BFCC7ABA693CC5AA527F7724531F525338E8A
0;255;3;0;9;read: 3-3-0 s=2,c=0,t=7,pt=0,l=0,sg=0:I feel more secure now

-
@ximinez Hm, good, but I still see no signed message. But at least a nonce was sent
-
@Anticimex Sensor values are getting through though. And signing is requested on both ends (for one sensor so far). I can't see any other #defines that should be set to enable signing. I get the same result on both the zombie sensor and the unmodded one.
I get three "sign fail" (showing up as verify fail on gw) before the sketch reaches setup(), where the ATSHA gets powered up. I will need to power the ATSHA somewhere in the mysensors library. However, once setup() is reached, the ATSHA seems to handle powering down and up just fine.
I can however say that it the Si7021 doesn't like being powered off and back on again after sleep. That causes the MCU to reset.
-
@ximinez Ah, yes, on development branch the signing backend clear the sign flag when it verifies the message. so it will always show as 0 without verbose signing debug enabled.
I know there have been discussions about a "pre setup" to be used for early sketch init. You probably want to power the atsha for early handshaking as well to get the sketch name and such to propagate properly. @hek perhaps has the latest on such features.
-
I've built a nicer-looking serial gateway instead of the rather large ethernet gateway. I thought that would basically be a "slot-in" as long as I personalize the GW it with the same SOFT_HMAC_KEY, SOFT_SERIAL and AES_KEY as the original GW. Are there more steps that need to be taken to get the sensors to connect?

-
No matter what I do now, this is what I get:
send: 2-2-0-0 s=1,c=3,t=16,pt=0,l=0,sg=0,st=fail:
sign fail
send: 2-2-0-0 s=1,c=1,t=0,pt=7,l=5,sg=0,st=fail:26.0
send: 2-2-0-0 s=2,c=3,t=16,pt=0,l=0,sg=0,st=fail:
sign fail
send: 2-2-0-0 s=2,c=1,t=1,pt=2,l=2,sg=0,st=fail:34
send: 2-2-0-0 s=255,c=3,t=16,pt=0,l=0,sg=0,st=fail:
sign fail
-
You must not use the same serial across nodes. Serial have to be unique. HMAC have to be identical.
-
Yes, I know serial must be unique. Serials go in the whitelist for the corresponding node ID. It turned out to be the NRF24L01+-modules with antennas. Replaced it with a regular module and it worked fine.
(Which is strange, because one of those modules worked fine on the ethernet gw. It doesn't eat that much power does it?)
-
@ximinez The signing failing is due to messages not arriving (st=fail). So it is not signing that is your problem here.
However, with signing, messages are now "full size" which strains the RF link so if it is "weak" fewer messages get through if they are "longer". I suspect that is the problem here. Basically the usual stuff; adding caps, using a dedicated regulator and so on...
-
Looks like it works now, but what's the deal with the initial failed signs? Look at http://pastebin.ca/3585005 (GW side) and http://pastebin.ca/3585014 (Sensor side. Not the same powerup). It starts by failing a lot, then after a while everything looks OK.
-
@ximinez difficult to say. Maybe a long stabilization period for the regulator. You could try to add a delay in early init in the library to see if it makes a difference.
-
@Anticimex and again, it is not failed signature errors per se. It is st=fail (transmission errors) that cause the signing backend to timeout. So it is not the performance of the atsha (or sw) that cause the issue here, it is the radio.
-
@tbowmo said:
While you're at it, also power down the external flash, as it might also contribute a bit..
I forgot about the flash. That would require bootloader support though? Or is the OTA done by jumping to the bootloader while running, keeping pin states?
I'm waiting for some SOIC breakouts in the mail. When I get them, I'll scavenge the ATSHA and flash module from my zombie sensor and build my own sensebender with blackjack and hookers.
-
Yes.. bootloader should probably by modified, if you decide to switch off the flash as well..
-
I did update the Arduino IDE and now I don't see the Sensebender Micro in the device list.
I'm using 1.6.5 and did copy the content to the boards.txt.Is there something else I have to do?
# See: http://code.google.com/p/arduino/wiki/Platforms menu.cpu=Processor ############################################################## yun.name=Arduino Yún yun.upload.via_ssh=true yun.vid.0=0x2341 yun.pid.0=0x0041 yun.vid.1=0x2341 yun.pid.1=0x8041 yun.vid.2=0x2A03 yun.pid.2=0x0041 yun.vid.3=0x2A03 yun.pid.3=0x8041 yun.upload.tool=avrdude yun.upload.protocol=avr109 yun.upload.maximum_size=28672 yun.upload.maximum_data_size=2560 yun.upload.speed=57600 yun.upload.disable_flushing=true yun.upload.use_1200bps_touch=true yun.upload.wait_for_upload_port=true yun.bootloader.tool=avrdude yun.bootloader.low_fuses=0xff yun.bootloader.high_fuses=0xd8 yun.bootloader.extended_fuses=0xfb yun.bootloader.file=caterina/Caterina-Yun.hex yun.bootloader.unlock_bits=0x3F yun.bootloader.lock_bits=0x2F yun.build.mcu=atmega32u4 yun.build.f_cpu=16000000L yun.build.vid=0x2341 yun.build.pid=0x8041 yun.build.usb_product="Arduino Yun" yun.build.board=AVR_YUN yun.build.core=arduino yun.build.variant=yun yun.build.extra_flags={build.usb_flags} ############################################################## uno.name=Arduino/Genuino Uno uno.vid.0=0x2341 uno.pid.0=0x0043 uno.vid.1=0x2341 uno.pid.1=0x0001 uno.vid.2=0x2A03 uno.pid.2=0x0043 uno.vid.3=0x2341 uno.pid.3=0x0243 uno.upload.tool=avrdude uno.upload.protocol=arduino uno.upload.maximum_size=32256 uno.upload.maximum_data_size=2048 uno.upload.speed=115200 uno.bootloader.tool=avrdude uno.bootloader.low_fuses=0xFF uno.bootloader.high_fuses=0xDE uno.bootloader.extended_fuses=0x05 uno.bootloader.unlock_bits=0x3F uno.bootloader.lock_bits=0x0F uno.bootloader.file=optiboot/optiboot_atmega328.hex uno.build.mcu=atmega328p uno.build.f_cpu=16000000L uno.build.board=AVR_UNO uno.build.core=arduino uno.build.variant=standard ############################################################## diecimila.name=Arduino Duemilanove or Diecimila diecimila.upload.tool=avrdude diecimila.upload.protocol=arduino diecimila.bootloader.tool=avrdude diecimila.bootloader.low_fuses=0xFF diecimila.bootloader.unlock_bits=0x3F diecimila.bootloader.lock_bits=0x0F diecimila.build.f_cpu=16000000L diecimila.build.board=AVR_DUEMILANOVE diecimila.build.core=arduino diecimila.build.variant=standard ## Arduino Duemilanove or Diecimila w/ ATmega328 ## --------------------------------------------- diecimila.menu.cpu.atmega328=ATmega328 diecimila.menu.cpu.atmega328.upload.maximum_size=30720 diecimila.menu.cpu.atmega328.upload.maximum_data_size=2048 diecimila.menu.cpu.atmega328.upload.speed=57600 diecimila.menu.cpu.atmega328.bootloader.high_fuses=0xDA diecimila.menu.cpu.atmega328.bootloader.extended_fuses=0x05 diecimila.menu.cpu.atmega328.bootloader.file=atmega/ATmegaBOOT_168_atmega328.hex diecimila.menu.cpu.atmega328.build.mcu=atmega328p ## Arduino Duemilanove or Diecimila w/ ATmega168 ## --------------------------------------------- diecimila.menu.cpu.atmega168=ATmega168 diecimila.menu.cpu.atmega168.upload.maximum_size=14336 diecimila.menu.cpu.atmega168.upload.maximum_data_size=1024 diecimila.menu.cpu.atmega168.upload.speed=19200 diecimila.menu.cpu.atmega168.bootloader.high_fuses=0xdd diecimila.menu.cpu.atmega168.bootloader.extended_fuses=0x00 diecimila.menu.cpu.atmega168.bootloader.file=atmega/ATmegaBOOT_168_diecimila.hex diecimila.menu.cpu.atmega168.build.mcu=atmega168 ############################################################## nano.name=Arduino Nano nano.upload.tool=avrdude nano.upload.protocol=arduino nano.bootloader.tool=avrdude nano.bootloader.unlock_bits=0x3F nano.bootloader.lock_bits=0x0F nano.build.f_cpu=16000000L nano.build.board=AVR_NANO nano.build.core=arduino nano.build.variant=eightanaloginputs ## Arduino Nano w/ ATmega328 ## ------------------------- nano.menu.cpu.atmega328=ATmega328 nano.menu.cpu.atmega328.upload.maximum_size=30720 nano.menu.cpu.atmega328.upload.maximum_data_size=2048 nano.menu.cpu.atmega328.upload.speed=57600 nano.menu.cpu.atmega328.bootloader.low_fuses=0xFF nano.menu.cpu.atmega328.bootloader.high_fuses=0xDA nano.menu.cpu.atmega328.bootloader.extended_fuses=0x05 nano.menu.cpu.atmega328.bootloader.file=atmega/ATmegaBOOT_168_atmega328.hex nano.menu.cpu.atmega328.build.mcu=atmega328p ## Arduino Nano w/ ATmega168 ## ------------------------- nano.menu.cpu.atmega168=ATmega168 nano.menu.cpu.atmega168.upload.maximum_size=14336 nano.menu.cpu.atmega168.upload.maximum_data_size=1024 nano.menu.cpu.atmega168.upload.speed=19200 nano.menu.cpu.atmega168.bootloader.low_fuses=0xff nano.menu.cpu.atmega168.bootloader.high_fuses=0xdd nano.menu.cpu.atmega168.bootloader.extended_fuses=0x00 nano.menu.cpu.atmega168.bootloader.file=atmega/ATmegaBOOT_168_diecimila.hex nano.menu.cpu.atmega168.build.mcu=atmega168 ############################################################## mega.name=Arduino/Genuino Mega or Mega 2560 mega.vid.0=0x2341 mega.pid.0=0x0010 mega.vid.1=0x2341 mega.pid.1=0x0042 mega.vid.2=0x2A03 mega.pid.2=0x0010 mega.vid.3=0x2A03 mega.pid.3=0x0042 mega.vid.4=0x2341 mega.pid.4=0x0210 mega.vid.5=0x2341 mega.pid.5=0x0242 mega.upload.tool=avrdude mega.upload.maximum_data_size=8192 mega.bootloader.tool=avrdude mega.bootloader.low_fuses=0xFF mega.bootloader.unlock_bits=0x3F mega.bootloader.lock_bits=0x0F mega.build.f_cpu=16000000L mega.build.core=arduino mega.build.variant=mega # default board may be overridden by the cpu menu mega.build.board=AVR_MEGA2560 ## Arduino/Genuino Mega w/ ATmega2560 ## ------------------------- mega.menu.cpu.atmega2560=ATmega2560 (Mega 2560) mega.menu.cpu.atmega2560.upload.protocol=wiring mega.menu.cpu.atmega2560.upload.maximum_size=253952 mega.menu.cpu.atmega2560.upload.speed=115200 mega.menu.cpu.atmega2560.bootloader.high_fuses=0xD8 mega.menu.cpu.atmega2560.bootloader.extended_fuses=0xFD mega.menu.cpu.atmega2560.bootloader.file=stk500v2/stk500boot_v2_mega2560.hex mega.menu.cpu.atmega2560.build.mcu=atmega2560 mega.menu.cpu.atmega2560.build.board=AVR_MEGA2560 ## Arduino Mega w/ ATmega1280 ## ------------------------- mega.menu.cpu.atmega1280=ATmega1280 mega.menu.cpu.atmega1280.upload.protocol=arduino mega.menu.cpu.atmega1280.upload.maximum_size=126976 mega.menu.cpu.atmega1280.upload.speed=57600 mega.menu.cpu.atmega1280.bootloader.high_fuses=0xDA mega.menu.cpu.atmega1280.bootloader.extended_fuses=0xF5 mega.menu.cpu.atmega1280.bootloader.file=atmega/ATmegaBOOT_168_atmega1280.hex mega.menu.cpu.atmega1280.build.mcu=atmega1280 mega.menu.cpu.atmega1280.build.board=AVR_MEGA ############################################################## megaADK.name=Arduino Mega ADK megaADK.vid.0=0x2341 megaADK.pid.0=0x003f megaADK.vid.1=0x2341 megaADK.pid.1=0x0044 megaADK.vid.2=0x2A03 megaADK.pid.2=0x003f megaADK.vid.3=0x2A03 megaADK.pid.3=0x0044 megaADK.upload.tool=avrdude megaADK.upload.protocol=wiring megaADK.upload.maximum_size=253952 megaADK.upload.maximum_data_size=8192 megaADK.upload.speed=115200 megaADK.bootloader.tool=avrdude megaADK.bootloader.low_fuses=0xFF megaADK.bootloader.high_fuses=0xD8 megaADK.bootloader.extended_fuses=0xFD megaADK.bootloader.file=stk500v2/stk500boot_v2_mega2560.hex megaADK.bootloader.unlock_bits=0x3F megaADK.bootloader.lock_bits=0x0F megaADK.build.mcu=atmega2560 megaADK.build.f_cpu=16000000L megaADK.build.board=AVR_ADK megaADK.build.core=arduino megaADK.build.variant=mega ############################################################## leonardo.name=Arduino Leonardo leonardo.vid.0=0x2341 leonardo.pid.0=0x0036 leonardo.vid.1=0x2341 leonardo.pid.1=0x8036 leonardo.vid.2=0x2A03 leonardo.pid.2=0x0036 leonardo.vid.3=0x2A03 leonardo.pid.3=0x8036 leonardo.upload.tool=avrdude leonardo.upload.protocol=avr109 leonardo.upload.maximum_size=28672 leonardo.upload.maximum_data_size=2560 leonardo.upload.speed=57600 leonardo.upload.disable_flushing=true leonardo.upload.use_1200bps_touch=true leonardo.upload.wait_for_upload_port=true leonardo.bootloader.tool=avrdude leonardo.bootloader.low_fuses=0xff leonardo.bootloader.high_fuses=0xd8 leonardo.bootloader.extended_fuses=0xcb leonardo.bootloader.file=caterina/Caterina-Leonardo.hex leonardo.bootloader.unlock_bits=0x3F leonardo.bootloader.lock_bits=0x2F leonardo.build.mcu=atmega32u4 leonardo.build.f_cpu=16000000L leonardo.build.vid=0x2341 leonardo.build.pid=0x8036 leonardo.build.usb_product="Arduino Leonardo" leonardo.build.board=AVR_LEONARDO leonardo.build.core=arduino leonardo.build.variant=leonardo leonardo.build.extra_flags={build.usb_flags} ############################################################## micro.name=Arduino/Genuino Micro micro.vid.0=0x2341 micro.pid.0=0x0037 micro.vid.1=0x2341 micro.pid.1=0x8037 micro.vid.2=0x2A03 micro.pid.2=0x0037 micro.vid.3=0x2A03 micro.pid.3=0x8037 micro.vid.4=0x2341 micro.pid.4=0x0237 # If the board is a 2341:0237 use 2341:8237 for build and set # other parameters as well micro.vid.4.build.vid=0x2341 micro.vid.4.build.pid=0x8237 micro.vid.4.build.usb_product="Genuino Micro" micro.vid.4.bootloader.file=caterina/Caterina-Genuino-Micro.hex micro.vid.5=0x2341 micro.pid.5=0x8237 # If the board is a 2341:8237 use 2341:8237 for build and set # other paramters as well micro.vid.5.build.vid=0x2341 micro.vid.5.build.pid=0x8237 micro.vid.5.build.usb_product="Genuino Micro" micro.vid.5.bootloader.file=caterina/Caterina-Genuino-Micro.hex micro.upload.tool=avrdude micro.upload.protocol=avr109 micro.upload.maximum_size=28672 micro.upload.maximum_data_size=2560 micro.upload.speed=57600 micro.upload.disable_flushing=true micro.upload.use_1200bps_touch=true micro.upload.wait_for_upload_port=true micro.bootloader.tool=avrdude micro.bootloader.low_fuses=0xff micro.bootloader.high_fuses=0xd8 micro.bootloader.extended_fuses=0xcb micro.bootloader.file=caterina/Caterina-Micro.hex micro.bootloader.unlock_bits=0x3F micro.bootloader.lock_bits=0x2F micro.build.mcu=atmega32u4 micro.build.f_cpu=16000000L micro.build.vid=0x2341 micro.build.pid=0x8037 micro.build.usb_product="Arduino Micro" micro.build.board=AVR_MICRO micro.build.core=arduino micro.build.variant=micro micro.build.extra_flags={build.usb_flags} ############################################################## esplora.name=Arduino Esplora esplora.vid.0=0x2341 esplora.pid.0=0x003C esplora.vid.1=0x2341 esplora.pid.1=0x803C esplora.vid.2=0x2A03 esplora.pid.2=0x003C esplora.vid.3=0x2A03 esplora.pid.3=0x803C esplora.upload.tool=avrdude esplora.upload.protocol=avr109 esplora.upload.maximum_size=28672 esplora.upload.maximum_data_size=2560 esplora.upload.speed=57600 esplora.upload.disable_flushing=true esplora.upload.use_1200bps_touch=true esplora.upload.wait_for_upload_port=true esplora.bootloader.tool=avrdude esplora.bootloader.low_fuses=0xff esplora.bootloader.high_fuses=0xd8 esplora.bootloader.extended_fuses=0xcb esplora.bootloader.file=caterina/Caterina-Esplora.hex esplora.bootloader.unlock_bits=0x3F esplora.bootloader.lock_bits=0x2F esplora.build.mcu=atmega32u4 esplora.build.f_cpu=16000000L esplora.build.vid=0x2341 esplora.build.pid=0x803c esplora.build.usb_product="Arduino Esplora" esplora.build.board=AVR_ESPLORA esplora.build.core=arduino esplora.build.variant=leonardo esplora.build.extra_flags={build.usb_flags} ############################################################## mini.name=Arduino Mini mini.upload.tool=avrdude mini.upload.protocol=arduino mini.bootloader.tool=avrdude mini.bootloader.low_fuses=0xff mini.bootloader.unlock_bits=0x3F mini.bootloader.lock_bits=0x0F mini.build.f_cpu=16000000L mini.build.board=AVR_MINI mini.build.core=arduino mini.build.variant=eightanaloginputs ## Arduino Mini w/ ATmega328 ## ------------------------- mini.menu.cpu.atmega328=ATmega328 mini.menu.cpu.atmega328.upload.maximum_size=28672 mini.menu.cpu.atmega328.upload.maximum_data_size=2048 mini.menu.cpu.atmega328.upload.speed=115200 mini.menu.cpu.atmega328.bootloader.high_fuses=0xd8 mini.menu.cpu.atmega328.bootloader.extended_fuses=0x05 mini.menu.cpu.atmega328.bootloader.file=optiboot/optiboot_atmega328-Mini.hex mini.menu.cpu.atmega328.build.mcu=atmega328p ## Arduino Mini w/ ATmega168 ## ------------------------- mini.menu.cpu.atmega168=ATmega168 mini.menu.cpu.atmega168.upload.maximum_size=14336 mini.menu.cpu.atmega168.upload.maximum_data_size=1024 mini.menu.cpu.atmega168.upload.speed=19200 mini.menu.cpu.atmega168.bootloader.high_fuses=0xdd mini.menu.cpu.atmega168.bootloader.extended_fuses=0x00 mini.menu.cpu.atmega168.bootloader.file=atmega/ATmegaBOOT_168_ng.hex mini.menu.cpu.atmega168.build.mcu=atmega168 ############################################################## ethernet.name=Arduino Ethernet ethernet.upload.tool=avrdude ethernet.upload.protocol=arduino ethernet.upload.maximum_size=32256 ethernet.upload.maximum_data_size=2048 ethernet.upload.speed=115200 ethernet.bootloader.tool=avrdude ethernet.bootloader.low_fuses=0xff ethernet.bootloader.high_fuses=0xde ethernet.bootloader.extended_fuses=0x05 ethernet.bootloader.file=optiboot/optiboot_atmega328.hex ethernet.bootloader.unlock_bits=0x3F ethernet.bootloader.lock_bits=0x0F ethernet.build.variant=ethernet ethernet.build.mcu=atmega328p ethernet.build.f_cpu=16000000L ethernet.build.board=AVR_ETHERNET ethernet.build.core=arduino ############################################################## fio.name=Arduino Fio fio.upload.tool=avrdude fio.upload.protocol=arduino fio.upload.maximum_size=30720 fio.upload.maximum_data_size=2048 fio.upload.speed=57600 fio.bootloader.tool=avrdude fio.bootloader.low_fuses=0xFF fio.bootloader.high_fuses=0xDA fio.bootloader.extended_fuses=0x05 fio.bootloader.file=atmega/ATmegaBOOT_168_atmega328_pro_8MHz.hex fio.bootloader.unlock_bits=0x3F fio.bootloader.lock_bits=0x0F fio.build.mcu=atmega328p fio.build.f_cpu=8000000L fio.build.board=AVR_FIO fio.build.core=arduino fio.build.variant=eightanaloginputs ############################################################## bt.name=Arduino BT bt.upload.tool=avrdude bt.upload.protocol=arduino bt.upload.speed=19200 bt.upload.disable_flushing=true bt.bootloader.tool=avrdude bt.bootloader.low_fuses=0xff bt.bootloader.unlock_bits=0x3F bt.bootloader.lock_bits=0x0F bt.build.f_cpu=16000000L bt.build.board=AVR_BT bt.build.core=arduino bt.build.variant=eightanaloginputs ## Arduino BT w/ ATmega328 ## ----------------------- bt.menu.cpu.atmega328=ATmega328 bt.menu.cpu.atmega328.upload.maximum_size=28672 bt.menu.cpu.atmega328.upload.maximum_data_size=2048 bt.menu.cpu.atmega328.bootloader.high_fuses=0xd8 bt.menu.cpu.atmega328.bootloader.extended_fuses=0x05 bt.menu.cpu.atmega328.bootloader.file=bt/ATmegaBOOT_168_atmega328_bt.hex bt.menu.cpu.atmega328.build.mcu=atmega328p ## Arduino BT w/ ATmega168 ## ----------------------- bt.menu.cpu.atmega168=ATmega168 bt.menu.cpu.atmega168.upload.maximum_size=14336 bt.menu.cpu.atmega168.upload.maximum_data_size=1024 bt.menu.cpu.atmega168.bootloader.high_fuses=0xdd bt.menu.cpu.atmega168.bootloader.extended_fuses=0x00 bt.menu.cpu.atmega168.bootloader.file=bt/ATmegaBOOT_168.hex bt.menu.cpu.atmega168.build.mcu=atmega168 ############################################################## LilyPadUSB.name=LilyPad Arduino USB LilyPadUSB.vid.0=0x1B4F LilyPadUSB.pid.0=0x9207 LilyPadUSB.vid.1=0x1B4F LilyPadUSB.pid.1=0x9208 LilyPadUSB.upload.tool=avrdude LilyPadUSB.upload.protocol=avr109 LilyPadUSB.upload.maximum_size=28672 LilyPadUSB.upload.maximum_data_size=2560 LilyPadUSB.upload.speed=57600 LilyPadUSB.upload.disable_flushing=true LilyPadUSB.upload.use_1200bps_touch=true LilyPadUSB.upload.wait_for_upload_port=true LilyPadUSB.bootloader.tool=avrdude LilyPadUSB.bootloader.low_fuses=0xff LilyPadUSB.bootloader.high_fuses=0xd8 LilyPadUSB.bootloader.extended_fuses=0xce LilyPadUSB.bootloader.file=caterina-LilyPadUSB/Caterina-LilyPadUSB.hex LilyPadUSB.bootloader.unlock_bits=0x3F LilyPadUSB.bootloader.lock_bits=0x2F LilyPadUSB.build.mcu=atmega32u4 LilyPadUSB.build.f_cpu=8000000L LilyPadUSB.build.vid=0x1B4F LilyPadUSB.build.pid=0x9208 LilyPadUSB.build.usb_product="LilyPad USB" LilyPadUSB.build.board=AVR_LILYPAD_USB LilyPadUSB.build.core=arduino LilyPadUSB.build.variant=leonardo LilyPadUSB.build.extra_flags={build.usb_flags} ############################################################## lilypad.name=LilyPad Arduino lilypad.upload.tool=avrdude lilypad.upload.protocol=arduino lilypad.bootloader.tool=avrdude lilypad.bootloader.unlock_bits=0x3F lilypad.bootloader.lock_bits=0x0F lilypad.build.f_cpu=8000000L lilypad.build.board=AVR_LILYPAD lilypad.build.core=arduino lilypad.build.variant=standard ## LilyPad Arduino w/ ATmega328 ## ---------------------------- lilypad.menu.cpu.atmega328=ATmega328 lilypad.menu.cpu.atmega328.upload.maximum_size=30720 lilypad.menu.cpu.atmega328.upload.maximum_data_size=2048 lilypad.menu.cpu.atmega328.upload.speed=57600 lilypad.menu.cpu.atmega328.bootloader.low_fuses=0xFF lilypad.menu.cpu.atmega328.bootloader.high_fuses=0xDA lilypad.menu.cpu.atmega328.bootloader.extended_fuses=0x05 lilypad.menu.cpu.atmega328.bootloader.file=atmega/ATmegaBOOT_168_atmega328_pro_8MHz.hex lilypad.menu.cpu.atmega328.build.mcu=atmega328p ## LilyPad Arduino w/ ATmega168 ## ---------------------------- lilypad.menu.cpu.atmega168=ATmega168 lilypad.menu.cpu.atmega168.upload.maximum_size=14336 lilypad.menu.cpu.atmega168.upload.maximum_data_size=1024 lilypad.menu.cpu.atmega168.upload.speed=19200 lilypad.menu.cpu.atmega168.bootloader.low_fuses=0xe2 lilypad.menu.cpu.atmega168.bootloader.high_fuses=0xdd lilypad.menu.cpu.atmega168.bootloader.extended_fuses=0x00 lilypad.menu.cpu.atmega168.bootloader.file=lilypad/LilyPadBOOT_168.hex lilypad.menu.cpu.atmega168.build.mcu=atmega168 ############################################################## pro.name=Arduino Pro or Pro Mini pro.upload.tool=avrdude pro.upload.protocol=arduino pro.bootloader.tool=avrdude pro.bootloader.unlock_bits=0x3F pro.bootloader.lock_bits=0x0F pro.build.board=AVR_PRO pro.build.core=arduino pro.build.variant=eightanaloginputs ## Arduino Pro or Pro Mini (5V, 16 MHz) w/ ATmega328 ## ------------------------------------------------- pro.menu.cpu.16MHzatmega328=ATmega328 (5V, 16 MHz) pro.menu.cpu.16MHzatmega328.upload.maximum_size=30720 pro.menu.cpu.16MHzatmega328.upload.maximum_data_size=2048 pro.menu.cpu.16MHzatmega328.upload.speed=57600 pro.menu.cpu.16MHzatmega328.bootloader.low_fuses=0xFF pro.menu.cpu.16MHzatmega328.bootloader.high_fuses=0xDA pro.menu.cpu.16MHzatmega328.bootloader.extended_fuses=0x05 pro.menu.cpu.16MHzatmega328.bootloader.file=atmega/ATmegaBOOT_168_atmega328.hex pro.menu.cpu.16MHzatmega328.build.mcu=atmega328p pro.menu.cpu.16MHzatmega328.build.f_cpu=16000000L ## Arduino Pro or Pro Mini (3.3V, 8 MHz) w/ ATmega328 ## -------------------------------------------------- pro.menu.cpu.8MHzatmega328=ATmega328 (3.3V, 8 MHz) pro.menu.cpu.8MHzatmega328.upload.maximum_size=30720 pro.menu.cpu.8MHzatmega328.upload.maximum_data_size=2048 pro.menu.cpu.8MHzatmega328.upload.speed=57600 pro.menu.cpu.8MHzatmega328.bootloader.low_fuses=0xFF pro.menu.cpu.8MHzatmega328.bootloader.high_fuses=0xDA pro.menu.cpu.8MHzatmega328.bootloader.extended_fuses=0x05 pro.menu.cpu.8MHzatmega328.bootloader.file=atmega/ATmegaBOOT_168_atmega328_pro_8MHz.hex pro.menu.cpu.8MHzatmega328.build.mcu=atmega328p pro.menu.cpu.8MHzatmega328.build.f_cpu=8000000L ## Arduino Pro or Pro Mini (5V, 16 MHz) w/ ATmega168 ## ------------------------------------------------- pro.menu.cpu.16MHzatmega168=ATmega168 (5V, 16 MHz) pro.menu.cpu.16MHzatmega168.upload.maximum_size=14336 pro.menu.cpu.16MHzatmega168.upload.maximum_data_size=1024 pro.menu.cpu.16MHzatmega168.upload.speed=19200 pro.menu.cpu.16MHzatmega168.bootloader.low_fuses=0xff pro.menu.cpu.16MHzatmega168.bootloader.high_fuses=0xdd pro.menu.cpu.16MHzatmega168.bootloader.extended_fuses=0x00 pro.menu.cpu.16MHzatmega168.bootloader.file=atmega/ATmegaBOOT_168_diecimila.hex pro.menu.cpu.16MHzatmega168.build.mcu=atmega168 pro.menu.cpu.16MHzatmega168.build.f_cpu=16000000L ## Arduino Pro or Pro Mini (3.3V, 8 MHz) w/ ATmega168 ## -------------------------------------------------- pro.menu.cpu.8MHzatmega168=ATmega168 (3.3V, 8 MHz) pro.menu.cpu.8MHzatmega168.upload.maximum_size=14336 pro.menu.cpu.8MHzatmega168.upload.maximum_data_size=1024 pro.menu.cpu.8MHzatmega168.upload.speed=19200 pro.menu.cpu.8MHzatmega168.bootloader.low_fuses=0xc6 pro.menu.cpu.8MHzatmega168.bootloader.high_fuses=0xdd pro.menu.cpu.8MHzatmega168.bootloader.extended_fuses=0x00 pro.menu.cpu.8MHzatmega168.bootloader.file=atmega/ATmegaBOOT_168_pro_8MHz.hex pro.menu.cpu.8MHzatmega168.build.mcu=atmega168 pro.menu.cpu.8MHzatmega168.build.f_cpu=8000000L ############################################################## atmegang.name=Arduino NG or older atmegang.upload.tool=avrdude atmegang.upload.protocol=arduino atmegang.upload.speed=19200 atmegang.bootloader.tool=avrdude atmegang.bootloader.unlock_bits=0x3F atmegang.bootloader.lock_bits=0x0F atmegang.build.mcu=atmegang atmegang.build.f_cpu=16000000L atmegang.build.board=AVR_NG atmegang.build.core=arduino atmegang.build.variant=standard ## Arduino NG or older w/ ATmega168 ## -------------------------------- atmegang.menu.cpu.atmega168=ATmega168 atmegang.menu.cpu.atmega168.upload.maximum_size=14336 atmegang.menu.cpu.atmega168.upload.maximum_data_size=1024 atmegang.menu.cpu.atmega168.bootloader.low_fuses=0xff atmegang.menu.cpu.atmega168.bootloader.high_fuses=0xdd atmegang.menu.cpu.atmega168.bootloader.extended_fuses=0x00 atmegang.menu.cpu.atmega168.bootloader.file=atmega/ATmegaBOOT_168_ng.hex atmegang.menu.cpu.atmega168.build.mcu=atmega168 ## Arduino NG or older w/ ATmega8 ## ------------------------------ atmegang.menu.cpu.atmega8=ATmega8 atmegang.menu.cpu.atmega8.upload.maximum_size=7168 atmegang.menu.cpu.atmega8.upload.maximum_data_size=1024 atmegang.menu.cpu.atmega8.bootloader.low_fuses=0xdf atmegang.menu.cpu.atmega8.bootloader.high_fuses=0xca atmegang.menu.cpu.atmega8.bootloader.file=atmega8/ATmegaBOOT-prod-firmware-2009-11-07.hex atmegang.menu.cpu.atmega8.build.mcu=atmega8 ############################################################## robotControl.name=Arduino Robot Control robotControl.vid.0=0x2341 robotControl.pid.0=0x0038 robotControl.vid.1=0x2341 robotControl.pid.1=0x8038 robotControl.vid.2=0x2A03 robotControl.pid.2=0x0038 robotControl.vid.3=0x2A03 robotControl.pid.3=0x8038 robotControl.upload.tool=avrdude robotControl.upload.protocol=avr109 robotControl.upload.maximum_size=28672 robotControl.upload.maximum_data_size=2560 robotControl.upload.speed=57600 robotControl.upload.disable_flushing=true robotControl.upload.use_1200bps_touch=true robotControl.upload.wait_for_upload_port=true robotControl.bootloader.tool=avrdude robotControl.bootloader.low_fuses=0xff robotControl.bootloader.high_fuses=0xd8 robotControl.bootloader.extended_fuses=0xcb robotControl.bootloader.file=caterina-Arduino_Robot/Caterina-Robot-Control.hex robotControl.bootloader.unlock_bits=0x3F robotControl.bootloader.lock_bits=0x2F robotControl.build.mcu=atmega32u4 robotControl.build.f_cpu=16000000L robotControl.build.vid=0x2341 robotControl.build.pid=0x8038 robotControl.build.usb_product="Robot Control" robotControl.build.board=AVR_ROBOT_CONTROL robotControl.build.core=arduino robotControl.build.variant=robot_control robotControl.build.extra_flags={build.usb_flags} ############################################################## robotMotor.name=Arduino Robot Motor robotMotor.vid.0=0x2341 robotMotor.pid.0=0x0039 robotMotor.vid.1=0x2341 robotMotor.pid.1=0x8039 robotMotor.vid.2=0x2A03 robotMotor.pid.2=0x0039 robotMotor.vid.3=0x2A03 robotMotor.pid.3=0x8039 robotMotor.upload.tool=avrdude robotMotor.upload.protocol=avr109 robotMotor.upload.maximum_size=28672 robotMotor.upload.maximum_data_size=2560 robotMotor.upload.speed=57600 robotMotor.upload.disable_flushing=true robotMotor.upload.use_1200bps_touch=true robotMotor.upload.wait_for_upload_port=true robotMotor.bootloader.tool=avrdude robotMotor.bootloader.low_fuses=0xff robotMotor.bootloader.high_fuses=0xd8 robotMotor.bootloader.extended_fuses=0xcb robotMotor.bootloader.file=caterina-Arduino_Robot/Caterina-Robot-Motor.hex robotMotor.bootloader.unlock_bits=0x3F robotMotor.bootloader.lock_bits=0x2F robotMotor.build.mcu=atmega32u4 robotMotor.build.f_cpu=16000000L robotMotor.build.vid=0x2341 robotMotor.build.pid=0x8039 robotMotor.build.usb_product="Robot Motor" robotMotor.build.board=AVR_ROBOT_MOTOR robotMotor.build.core=arduino robotMotor.build.variant=robot_motor robotMotor.build.extra_flags={build.usb_flags} ############################################################## gemma.vid.0=0x2341 gemma.pid.0=0x0c9f gemma.name=Arduino Gemma gemma.bootloader.low_fuses=0xF1 gemma.bootloader.high_fuses=0xD5 gemma.bootloader.extended_fuses=0xFE gemma.bootloader.tool=avrdude gemma.bootloader.lock_bits= gemma.bootloader.unlock_bits= gemma.bootloader.file=gemma/gemma_v1.hex gemma.build.mcu=attiny85 gemma.build.f_cpu=8000000L gemma.build.core=arduino gemma.build.variant=gemma gemma.build.board=AVR_GEMMA gemma.upload.tool=avrdude gemma.upload.maximum_size=5310 menu.cpu=Processor ###################################### ## Sensebender Micro MysensorsMicro.name=Sensebender Micro MysensorsMicro.upload.tool=arduino:avrdude MysensorsMicro.upload.protocol=arduino MysensorsMicro.upload.maximum_size=30720 MysensorsMicro.upload.maximum_data_size=2048 MysensorsMicro.upload.speed=57600 MysensorsMicro.bootloader.tool=arduino:avrdude MysensorsMicro.bootloader.unlock_bits=0x3F MysensorsMicro.bootloader.lock_bits=0x0F MysensorsMicro.bootloader.low_fuses=0xE2 MysensorsMicro.bootloader.high_fuses=0xD2 MysensorsMicro.bootloader.extended_fuses=0x06 MysensorsMicro.bootloader.file=DualOptiboot/optiboot_atmega328_pro_8MHz.hex MysensorsMicro.build.board=AVR_MICRO8 MysensorsMicro.build.core=arduino:arduino MysensorsMicro.build.variant=micro MysensorsMicro.build.mcu=atmega328p #MysensorsMicro.build.f_cpu=8000000L MysensorsMicro.menu.cpu.8Mhz=Atmega328 8Mhz MysensorsMicro.menu.cpu.8Mhz.build.f_cpu=8000000L MysensorsMicro.menu.cpu.1Mhz=Atmega328 1Mhz MysensorsMicro.menu.cpu.1Mhz.build.f_cpu=1000000LI'm using a Mac if it is important.