💬 Building a Raspberry Pi Gateway
-
Please help...
-
@pepson Just a suggestion, but are you sure the Pi3 is looking at ttyUSB1, ie have you confirmed this is the Gateway serial connection ?
I am using direct serial connection to the pi3 GPIO as ttySO with Domoticz, but when I tried a USB Gateway at one point, the connection was NOT working using the expected ttyUSB quoted. I had to check the tty connections via Putty to establish the actual link...
-
But can you give me commend to build it as you use ttySO ?
-
I build it as ttySO
./configure --my-transport=rfm69 --my-rfm69-frequency=868 --my-is-rfm69hw --my-gateway=serial --my-serial-is-pty --my-serial-pty=/dev/ttySOand i have and info:
2017-12-28 15:40:21.822 MySensors: Using serial port: /dev/ttyS0
2017-12-28 15:40:21.832 Error: MySensors: Error opening serial port!
-
Then build as /dev/serial0 and the same problem. This is show in log Domoticz. One read version and port closed.
2017-12-28 15:48:14.418 MySensors: Using serial port: /dev/serial0
2017-12-28 15:48:14.418 MySensors: Gateway Version: 2.2.0-rc.2
2017-12-28 15:48:14.418 Error: Serial Port closed!... Error: End of file
2017-12-28 15:48:15.418 MySensors: retrying in 30 seconds...
-
@pepson could you post your hardware settings in Domoticz? This is what works for me:
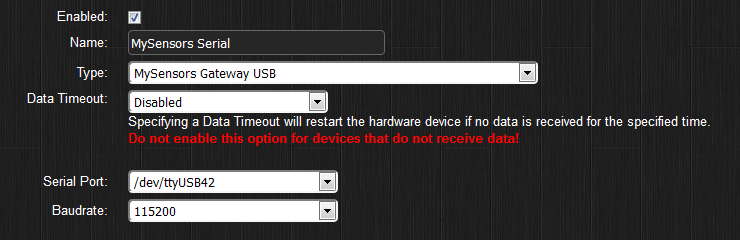
Could you also try building the gateway without rfm69 support, to check if the problem is generic or related to rfm69. Use this:
./configure --my-transport=none --my-gateway=serial --my-serial-is-pty --my-serial-pty=/dev/ttyUSB42 make && sudo ./bin/mysgw -d
-
Hello
Thanks for your help. I start from beginning build DOmoticz on my RPi3 with clean latest image. After run in Sudo raspi-config i enable SPI and Serial , then install DOmoticz and now all works OK. Then build Mysensor Gateway and all is ok with no error in Domoticz. Works on /dev/ttyUSB42
-
But how i can build MySensors Gateway on serial with radio RFM69HW but on old version 2.1.1 ?
-
And have next problem... i build sketch on version 2.2.0-rc2 but after write to Arduino Mini Pro he is not connected to my Gateway on RPI3.
This is sketch. What is wrong ?
/* Relay with button sketch modified to work with no uplink to gateway and try to maintain sync to controller */ #define MY_DEBUG // Enable debug prints to serial monitor #define MY_RADIO_RFM69 #define MY_RFM69_FREQUENCY 868 #define MY_IS_RFM69HW #define MY_RFM69_NEW_DRIVER //#define MY_NODE_ID 203 // Node id defaults to AUTO (tries to fetch id from controller) #define MY_TRANSPORT_WAIT_READY_MS 5000 //set how long to wait for transport ready in milliseconds #define MY_REPEATER_FEATURE // Enabled repeater feature for this node #include <MySensors.h> #include <Bounce2.h> #define RELAY_PIN 5 // Arduino Digital I/O pin number for relay #define BUTTON_PIN 3 // Arduino Digital I/O pin number for button #define CHILD_ID 1 // Id of the sensor child #define RELAY_ON 1 #define RELAY_OFF 0 Bounce debouncer = Bounce(); int oldValue = 0; bool uplinkAvailable = true; bool state = false; bool requestState; bool firstStart = true; unsigned long uplinkCheckTime ; // holder for uplink checks unsigned long uplinkCheckPeriod = 30*1000; // time between checks for uplink in milliseconds unsigned long returnWait = 1000; // how long to wait for return from controller in milliseconds.. adjust as needed unsigned long oldTime = 0; unsigned long newTime = 0; MyMessage msg(CHILD_ID, V_STATUS); void setup(){ pinMode(BUTTON_PIN, INPUT_PULLUP); // Setup the button pin, Activate internal pull-up debouncer.attach(BUTTON_PIN); // After setting up the button, setup debouncer debouncer.interval(5); pinMode(RELAY_PIN, OUTPUT); // set relay pin in output mode digitalWrite(RELAY_PIN, RELAY_OFF); // Make sure relay is off when starting up } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("1xRelay & Button", "2.2.0-rc2"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_BINARY); } void loop(){ if (firstStart) { // this code is only run once at startup Serial.println("First run started"); requestTime(); // get time from controller wait (returnWait); // delay to allow time to return if (oldTime == 0){ // check to see if there was a return from the time request Serial.println("uplink not available"); uplinkAvailable = false; // no uplink established uplinkCheckTime = millis(); } else{ Serial.println("uplink available"); request( CHILD_ID, V_STATUS); // get status of switch on controller wait (returnWait); //wait needed to allow request to return from controller Serial.print("controller state --- "); Serial.println(requestState); if (requestState != state) { // check that controller is corectly showing the current relay state send(msg.set(state), false); // notify controller of current state } } firstStart = false; // set firstStart flag false to prevent code from running again } debouncer.update(); int value = debouncer.read(); // Get the update value if (value != oldValue && value == 0) { // check for new button push state = !state; // Toggle the state digitalWrite(RELAY_PIN, state ? RELAY_ON : RELAY_OFF); // switch the relay to the new state requestTime(); wait (returnWait); // delay to allow time to return if (oldTime != newTime){ // if times are different then uplink is available send(msg.set(state), false); oldTime = newTime; } else{ // if times are the same no uplink is available Serial.println("uplink not available"); uplinkAvailable = false; // no uplink available, set flag false uplinkCheckTime = millis(); // start the timer from now } } oldValue = value; if (!uplinkAvailable && (millis() - uplinkCheckTime > uplinkCheckPeriod) ) { // test to see if function should be called uplinkCheck(); // call uplink checking function } } /*-------------------start of functions--------------------------*/ void receive(const MyMessage &message) { if (message.type == V_STATUS) { // check to see if incoming message is for a switch switch (message.getCommand()) { // message.getCommand will give us the command type of the incomming message case C_SET: //message is a set command from controller to update relay state state = message.getBool(); // get the new state digitalWrite(RELAY_PIN, state ? RELAY_ON : RELAY_OFF); // switch relay to new state uplinkAvailable = true; // uplink established /*---- Write some debug info----*/ Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); break; case C_REQ: // message is a returning request from controller requestState = message.getBool(); // update requestState with returning state break; } } } void uplinkCheck() { requestTime(); wait (returnWait); // wait for time return.. this may need to be varied for your system if (oldTime != newTime){ Serial.println("uplink re-established"); request( CHILD_ID, V_STATUS); wait (returnWait); //wait needed to allow request to return from controller if (requestState != state) { // check that controller is corectly showing the current relay state send(msg.set(state), false); // notify controller of current state no ack uplinkAvailable = true; // uplink established oldTime = newTime; } } uplinkCheckTime = millis(); // reset the checktime Serial.println("uplinkchecktime reset"); } void receiveTime(unsigned long time) { if (firstStart){ oldTime = time; newTime = time; } else{ newTime = time; } Serial.print("time received---- " ); Serial.println(time); }```
-
@pepson Try walking in little steps trying each stage rather than running into new walls then expressing surprise at broken nose, no offence intended
")
Gateway and nodes, same platform, same version..... Otherwise they are speaking Chinese and Swedish hoping for somebody to explain the meaning of fubar...
-
I use the same version now 2.2.0-rc2 but when i programmed sketch to node it not connection to Gateway... That i want come back to version 2.1.1 gateway but i dont know how ? Or resolved problem Node 2.2.0-rc2 i stay on this.
But when run debug gateway show this:
pi@domoticz:~/MySensors $ sudo ./bin/mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-rc.2 mysgw: MCO:BGN:INIT GW,CP=RPNGL---,VER=2.2.0-rc.2 mysgw: TSF:LRT:OK mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1 mysgw: !TSF:SAN:FAIL mysgw: TSM:FAIL:CNT=1 mysgw: TSM:FAIL:DIS mysgw: TSF:TDI:TSL mysgw: TSM:FAIL:RE-INIT mysgw: TSM:INIT mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODEThis is sketch 2.2.0-rc2
/* Relay with button sketch modified to work with no uplink to gateway and try to maintain sync to controller */ #define MY_DEBUG // Enable debug prints to serial monitor #define MY_RADIO_RFM69 #define RFM69_868MHZ #define MY_IS_RFM69HW #define MY_RFM69_NEW_DRIVER //#define MY_NODE_ID 203 // Node id defaults to AUTO (tries to fetch id from controller) #define MY_TRANSPORT_WAIT_READY_MS 5000 //set how long to wait for transport ready in milliseconds #define MY_REPEATER_FEATURE // Enabled repeater feature for this node #include <MySensors.h> #include <Bounce2.h> #define RELAY_PIN 5 // Arduino Digital I/O pin number for relay #define BUTTON_PIN 3 // Arduino Digital I/O pin number for button #define CHILD_ID 1 // Id of the sensor child #define RELAY_ON 1 #define RELAY_OFF 0 Bounce debouncer = Bounce(); int oldValue = 0; bool uplinkAvailable = true; bool state = false; bool requestState; bool firstStart = true; unsigned long uplinkCheckTime ; // holder for uplink checks unsigned long uplinkCheckPeriod = 30*1000; // time between checks for uplink in milliseconds unsigned long returnWait = 1000; // how long to wait for return from controller in milliseconds.. adjust as needed unsigned long oldTime = 0; unsigned long newTime = 0; MyMessage msg(CHILD_ID, V_STATUS); void setup(){ pinMode(BUTTON_PIN, INPUT_PULLUP); // Setup the button pin, Activate internal pull-up debouncer.attach(BUTTON_PIN); // After setting up the button, setup debouncer debouncer.interval(5); pinMode(RELAY_PIN, OUTPUT); // set relay pin in output mode digitalWrite(RELAY_PIN, RELAY_OFF); // Make sure relay is off when starting up } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("1xRelay & Button", "2.2.0-rc2"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_BINARY); } void loop(){ if (firstStart) { // this code is only run once at startup Serial.println("First run started"); requestTime(); // get time from controller wait (returnWait); // delay to allow time to return if (oldTime == 0){ // check to see if there was a return from the time request Serial.println("uplink not available"); uplinkAvailable = false; // no uplink established uplinkCheckTime = millis(); } else{ Serial.println("uplink available"); request( CHILD_ID, V_STATUS); // get status of switch on controller wait (returnWait); //wait needed to allow request to return from controller Serial.print("controller state --- "); Serial.println(requestState); if (requestState != state) { // check that controller is corectly showing the current relay state send(msg.set(state), false); // notify controller of current state } } firstStart = false; // set firstStart flag false to prevent code from running again } debouncer.update(); int value = debouncer.read(); // Get the update value if (value != oldValue && value == 0) { // check for new button push state = !state; // Toggle the state digitalWrite(RELAY_PIN, state ? RELAY_ON : RELAY_OFF); // switch the relay to the new state requestTime(); wait (returnWait); // delay to allow time to return if (oldTime != newTime){ // if times are different then uplink is available send(msg.set(state), false); oldTime = newTime; } else{ // if times are the same no uplink is available Serial.println("uplink not available"); uplinkAvailable = false; // no uplink available, set flag false uplinkCheckTime = millis(); // start the timer from now } } oldValue = value; if (!uplinkAvailable && (millis() - uplinkCheckTime > uplinkCheckPeriod) ) { // test to see if function should be called uplinkCheck(); // call uplink checking function } } /*-------------------start of functions--------------------------*/ void receive(const MyMessage &message) { if (message.type == V_STATUS) { // check to see if incoming message is for a switch switch (message.getCommand()) { // message.getCommand will give us the command type of the incomming message case C_SET: //message is a set command from controller to update relay state state = message.getBool(); // get the new state digitalWrite(RELAY_PIN, state ? RELAY_ON : RELAY_OFF); // switch relay to new state uplinkAvailable = true; // uplink established /*---- Write some debug info----*/ Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); break; case C_REQ: // message is a returning request from controller requestState = message.getBool(); // update requestState with returning state break; } } } void uplinkCheck() { requestTime(); wait (returnWait); // wait for time return.. this may need to be varied for your system if (oldTime != newTime){ Serial.println("uplink re-established"); request( CHILD_ID, V_STATUS); wait (returnWait); //wait needed to allow request to return from controller if (requestState != state) { // check that controller is corectly showing the current relay state send(msg.set(state), false); // notify controller of current state no ack uplinkAvailable = true; // uplink established oldTime = newTime; } } uplinkCheckTime = millis(); // reset the checktime Serial.println("uplinkchecktime reset"); } void receiveTime(unsigned long time) { if (firstStart){ oldTime = time; newTime = time; } else{ newTime = time; } Serial.print("time received---- " ); Serial.println(time); }```
-
@pepson Let's try the baby steps I referred to earlier.
The current stable version of MySensors is 2.1. Those using 2.2 tend to be experienced people versed in programming and experimenting and problem solving, hence it is not an official release.... yet you are using it and asking for solutions... Hello ?
I am and have been for the last few months using a Pro-Mini with RFM69 as nodes and gateway using 2.1 attached to a Pi3 running Domoticz.... No problems, but slowly coming to understand most of what I am doing...
I am still on baby steps, I don't mind at all, it works.....
-
Ok but i dont know how build Gateway on version 2.1.1 because when i do step by step as show on mysensors.org it default build me version gateway 2.2.0-rc2
-
@pepson As in this page? 2.1.1 - Latest Release ?
https://www.mysensors.org/download
-
I found bug in Domoticz BETA 8796. No reconized version gateway in HARDWARE. On stable 8153 works with no problem and correct reconized version gateway 2.2.0-rc2...
And again problem with this:
CODE: SELECT ALL2017-12-28 20:01:32.587 MySensors: retrying in 30 seconds...
2017-12-28 20:02:08.752 MySensors: Using serial port: /dev/serial0
2017-12-28 20:02:08.752 MySensors: Gateway Version: 2.2.0-rc.2
2017-12-28 20:02:08.752 Error: Serial Port closed!... Error: End of file
2017-12-28 20:02:09.752 MySensors: retrying in 30 seconds...
2017-12-28 20:02:38.755 MySensors: Using serial port: /dev/serial0
2017-12-28 20:02:38.755 Error: Serial Port closed!... Error: End of file
2017-12-28 20:02:39.755 MySensors: retrying in 30 seconds...
2017-12-28 20:03:08.757 MySensors: Using serial port: /dev/serial0
2017-12-28 20:03:08.761 Error: Serial Port closed!... Error: End of file
2017-12-28 20:03:09.758 MySensors: retrying in 30 seconds...
On beta is problem.
On stable works correct.
-
This post is deleted!
-
@macvictor said in
 Building a Raspberry Pi Gateway:
Building a Raspberry Pi Gateway:@marceloaqno Thank's for you help. I have other question.. general I try configure my gateway to work with security & signing, but they doesn't work. Where is problem? On the bottom i send point what it do it:
Gateway:
./configure --my-gateway=mqtt --my-controller-ip-address=127.0.0.1 --my-mqtt-publish-topic-prefix=mysensors-out --my-mqtt-subscribe-topic-prefix=mysensors-in --my-mqtt-client-id=mygateway1 --my-mqtt-password=PASS --my-mqtt-user=USER --my-rf24-encryption-enabled --my-signing=software --my-signing-request-signatures --my-signing-request-gw-signatures-from-allmakesudo make installsudo systemctl enable mysgw.servicesudo systemctl start mysgw.servicesudo mysgw --gen-soft-hmac-keysudo mysgw --set-soft-hmac-key=02417628BC1573CC380...sudo mysgw --gen-soft-serial-keysudo mysgw --set-soft-serial-key=00762CD152B868F7EBsudo mysgw --gen-aes-keysudo mysgw --set-aes-key= A790AD78B2D8B4DBBB5B2C4B9DD6DAF3
Node:
- Load script
SecurityPersonalizer.ino - Uncomment and send sketch to arduino
#define USE_SOFT_SIGNING #define STORE_SOFT_KEY #define USER_SOFT_KEY #define STORE_SOFT_SERIAL #define STORE_AES_KEY #define USER_AES_KEY #define MY_SOFT_HMAC_KEY 0X2,0X41,0X76,0X28,0XBC,0X15,0X73,0XCC,0X38... #define MY_AES_KEY 0XA7,0X90,0XAD,0X78,0XB2,0XD8...- Read all value from EPROM (test save):
Personalization sketch for MySensors usage. ------------------------------------------- EEPROM configuration: SOFT_HMAC_KEY | 02417628BC1573CC380DE0FADF7C87D7D3C77272A783E6E438786A07C3A8C6CF SOFT_SERIAL | 39BB1370C289643251 AES_KEY | A790AD78B2D8B4DBBB5B2C4B9DD6DAF3 -------------------------------- Personalization is now complete.- Send sample sketch to arduino:
//!< Enable debug prints to serial monitor #define MY_DEBUG //!< Enable signing related debug prints to serial monitor #define MY_DEBUG_VERBOSE_SIGNING // Enable NRF24L01 radio type #define MY_RADIO_NRF24 // Select soft signing #define MY_SIGNING_SOFT // Enable lockdown of node if suspicious activity is detected //-->> #define MY_NODE_LOCK_FEATURE // Enable node whitelisting //#define MY_SIGNING_NODE_WHITELISTING {{.nodeId = GATEWAY_ADDRESS,.serial = {0x09,0x08,0x07,0x06,0x05,0x04,0x03,0x02,0x01}}} // Enable this if you want destination node to sign all messages sent to this node. #define MY_SIGNING_REQUEST_SIGNATURES // SETTINGS FOR MY_SIGNING_SOFT #define MY_SIGNING_SOFT_RANDOMSEED_PIN 7 //!< Unconnected analog pin for random seed // Add repeater function to this sensor #define MY_REPEATER_FEATURE #include <SPI.h> #include <MySensors.h> #include <Bounce2.h> #define RELAY_PIN 4 // Arduino Digital I/O pin number for relay #define BUTTON_PIN 3 // Arduino Digital I/O pin number for button #define CHILD_ID 1 // Id of the sensor child #define RELAY_ON 1 #define RELAY_OFF 0 Bounce debouncer = Bounce(); int oldValue = 0; bool state; MyMessage msg(CHILD_ID, V_LIGHT); void setup() { // Setup the button pinMode(BUTTON_PIN, INPUT); // Activate internal pull-up digitalWrite(BUTTON_PIN, HIGH); // After setting up the button, setup debouncer debouncer.attach(BUTTON_PIN); debouncer.interval(5); // Make sure relays are off when starting up digitalWrite(RELAY_PIN, RELAY_OFF); // Then set relay pins in output mode pinMode(RELAY_PIN, OUTPUT); // Set relay to last known state (using eeprom storage) state = loadState(CHILD_ID); digitalWrite(RELAY_PIN, state ? RELAY_ON : RELAY_OFF); } void presentation() { // Send the sketch version information to the gateway and Controller sendSketchInfo("Relay & Button", "1.0"); // Register all sensors to gw (they will be created as child devices) present(CHILD_ID, S_LIGHT, "Switch Secure Sensor", false); } /* Example on how to asynchronously check for new messages from gw */ void loop() { debouncer.update(); // Get the update value int value = debouncer.read(); // if (value != oldValue && value == 0) { send(msg.set(state ? false : true), true); // Send new state and request ack back // } // oldValue = value; delay(5000); } void receive(const MyMessage &message) { // We only expect one type of message from controller. But we better check anyway. if (message.isAck()) { Serial.println("This is an ack from gateway"); } if (message.type == V_LIGHT) { // Change relay state state = message.getBool(); digitalWrite(RELAY_PIN, state ? RELAY_ON : RELAY_OFF); // Store state in eeprom // saveState(CHILD_ID, state); // Write some debug info Serial.print("Incoming change for sensor:"); Serial.print(message.sensor); Serial.print(", New status: "); Serial.println(message.getBool()); } }And finally in Arduino Serial Monitor I see:
0 MCO:BGN:INIT REPEATER,CP=RNNRAS-,VER=2.1.1 4 TSM:INIT 5 TSF:WUR:MS=0 11 TSM:INIT:TSP OK 13 TSF:SID:OK,ID=105 15 TSM:FPAR 16 Will not sign message for destination 255 as it does not require it 58 TSF:MSG:SEND,105-105-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 2065 !TSM:FPAR:NO REPLY 2067 TSM:FPAR 2068 Will not sign message for destination 255 as it does not require it 2110 TSF:MSG:SEND,105-105-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 4117 !TSM:FPAR:NO REPLY 4119 TSM:FPAR 4120 Will not sign message for destination 255 as it does not require it 4162 TSF:MSG:SEND,105-105-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 6169 !TSM:FPAR:NO REPLY 6171 TSM:FPAR 6172 Will not sign message for destination 255 as it does not require it 6214 TSF:MSG:SEND,105-105-255-255,s=255,c=3,t=7,pt=0,l=0,sg=0,ft=0,st=OK: 8221 !TSM:FPAR:FAIL 8222 TSM:FAIL:CNT=1 8224 TSM:FAIL:PDTand in gateway i see:
sudo mysgw -d mysgw: Starting gateway... mysgw: Protocol version - 2.1.1 mysgw: MCO:BGN:INIT GW,CP=RNNG-S-,VER=2.1.1 mysgw: TSF:LRT:OK mysgw: TSM:INIT mysgw: TSF:WUR:MS=0 mysgw: TSM:INIT:TSP OK mysgw: TSM:INIT:GW MODE mysgw: TSM:READY:ID=0,PAR=0,DIS=0 mysgw: MCO:REG:NOT NEEDED mysgw: MCO:BGN:STP mysgw: MCO:BGN:INIT OK,TSP=1 mysgw: Attempting MQTT connection... mysgw: connected to 127.0.0.1 mysgw: MQTT connected mysgw: Sending message on topic: mysensors-out/0/255/0/0/18 mysgw: TSF:MSG:READ,171-107-54,s=221,c=2,t=131,pt=4,l=25,sg=0:-1418183441 mysgw: !TSF:MSG:PVER,3=2 mysgw: TSF:MSG:READ,135-23-172,s=20,c=3,t=200,pt=7,l=25,sg=0:-0.00000178 mysgw: !TSF:MSG:PVER,1=2 mysgw: TSF:MSG:READ,34-66-89,s=168,c=1,t=9,pt=1,l=25,sg=0:56 mysgw: !TSF:MSG:PVER,1=2 mysgw: TSF:MSG:READ,223-46-240,s=112,c=5,t=192,pt=5,l=11,sg=1:1407647670 mysgw: TSF:MSG:REL MSG mysgw: !TSF:RTE:240 UNKNOWN mysgw: !TSF:MSG:SEND,223-0-240-240,s=112,c=5,t=192,pt=5,l=11,sg=1,ft=0,st=NACK:1407647670 mysgw: TSF:MSG:READ,183-139-129,s=37,c=6,t=155,pt=1,l=21,sg=0:48 mysgw: !TSF:MSG:PVER,0=2 mysgw: TSF:MSG:READ,139-214-233,s=61,c=3,t=193,pt=7,l=0,sg=1:0.00000000 mysgw: TSF:MSG:REL MSG mysgw: !TSF:RTE:233 UNKNOWN mysgw: !TSF:MSG:SEND,139-0-233-233,s=61,c=3,t=193,pt=7,l=0,sg=1,ft=0,st=NACK:0.00000000 mysgw: TSF:MSG:READ,83-33-7,s=179,c=2,t=27,pt=4,l=25,sg=1:-2057270722 mysgw: !TSF:MSG:PVER,3=2 mysgw: TSF:MSG:READ,110-148-67,s=113,c=0,t=158,pt=1,l=9,sg=1:251 mysgw: !TSF:MSG:PVER,1=2 mysgw: TSF:MSG:READ,75-209-102,s=204,c=7,t=25,pt=1,l=11,sg=1:52 mysgw: !TSF:MSG:PVER,0=2 mysgw: TSF:MSG:READ,184-209-235,s=58,c=1,t=140,pt=6,l=23,sg=1:1DC404A5401119FACF0000000000000000000000000000 mysgw: !TSF:MSG:PVER,3=2 mysgw: TSF:MSG:READ,172-203-51,s=140,c=2,t=173,pt=0,l=1,sg=1:? mysgw: TSF:MSG:REL MSG mysgw: !TSF:RTE:51 UNKNOWN mysgw: !TSF:MSG:SEND,172-0-51-51,s=140,c=2,t=173,pt=0,l=1,sg=1,ft=0,st=NACK:?Where is problem?
@macvictor
But how use itn on RFM69HW ? I dont see to be available #define MY_RFM69_ENABLE_ENCRYPTION... Only for #define MY_RF24_ENABLE_ENCRYPTION...
-
@pepson are you asking how to enable encryption on rfm69? (it is a bit unclear what you mean by "itn")
In that case, see https://www.mysensors.org/apidocs-beta/group__RFM69SettingGrpPub.html#ga17a7a919994e569f078e3787c2c4ecd2
-
-
@pepson yes I saw that. Thanks for checking. Have you reported the problem to the Domoticz team?
-
@mfalkvidd
Yes write on forum Domoticz in section BUG
-
@pepson great!
The report is at https://www.domoticz.com/forum/viewtopic.php?f=6&t=21125&sid=e414507bb1ca4596e93cf885047275a9 in case someone needs to find it in the future.
-
Hello!
I'm trying to "make" on Alpine Linux in a Docker (ok, maybe it's useless, but way interesting!).With a Debian image it's ok, but I'd like to use Alpine.
I get this error:
g++ -MT build/drivers/Linux/SPIDEV.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_GATEWAY_LINUX -DMY_GATEWAY_MQTT_CLIENT -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DSPI_SPIDEV_DEVICE=\"/dev/spidev0.0\" -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/SPIDEV.cpp -o build/drivers/Linux/SPIDEV.o In file included from /usr/include/sys/ioctl.h:7:0, from drivers/Linux/SPIDEV.cpp:27: drivers/Linux/SPIDEV.cpp: In static member function 'static uint8_t SPIDEVClass::transfer(uint8_t)': drivers/Linux/SPIDEV.cpp:153:18: error: '_IOC_SIZEBITS' was not declared in this scope ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); ^ drivers/Linux/SPIDEV.cpp: In static member function 'static void SPIDEVClass::transfernb(char*, char*, uint32_t)': drivers/Linux/SPIDEV.cpp:175:18: error: '_IOC_SIZEBITS' was not declared in this scope ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); ^ make: *** [Makefile:99: build/drivers/Linux/SPIDEV.o] Error 1 root@local-mysgw-alpine:/opt/MySensors3$ make g++ -MT build/drivers/Linux/SPIDEV.o -MMD -MP -march=armv7-a -mtune=cortex-a7 -mfpu=neon-vfpv4 -mfloat-abi=hard -DMY_GATEWAY_LINUX -DMY_GATEWAY_MQTT_CLIENT -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DSPI_SPIDEV_DEVICE=\"/dev/spidev0.0\" -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/SPIDEV.cpp -o build/drivers/Linux/SPIDEV.o eIn file included from /usr/include/sys/ioctl.h:7:0, from drivers/Linux/SPIDEV.cpp:27: drivers/Linux/SPIDEV.cpp: In static member function 'static uint8_t SPIDEVClass::transfer(uint8_t)': drivers/Linux/SPIDEV.cpp:153:18: error: '_IOC_SIZEBITS' was not declared in this scope ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); ^ drivers/Linux/SPIDEV.cpp: In static member function 'static void SPIDEVClass::transfernb(char*, char*, uint32_t)': drivers/Linux/SPIDEV.cpp:175:18: error: '_IOC_SIZEBITS' was not declared in this scope ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr); ^ make: *** [Makefile:99: build/drivers/Linux/SPIDEV.o] Error 1I'm surely missing a package... but can't state one. Any help?
@macvictor thanks for your post, it will help me a lot, I'm trying the same way.
-
@ghiglie https://lists.yoctoproject.org/pipermail/yocto/2016-January/028233.html seems to suggest that adding
#include <asm/ioctl.h>would solve the problem. Could you try that?
-
Was my fault!
**When copy and past command from word, for example, pay attention that software doesn't substitute the single "-" with a "-" longer.
I have a word with all commands, to replicate installation very fast. Was my fault (errr... Word fault.... but you understand). Have a nice day!
Hi,
I cannot go over the initialization of command.RPI3 + Amplified antenna by GertSander (https://www.openhardware.io/view/17/Raspberry-Pi2-GPIO-interface-for-NRF24L01). Power from 5v/3A and power for antenna taken from both 5V via the 3.3v stepper down.RPI3 is new, has about 12h (got yesterday).Yesterday it did work at first attempt. Today I would replicate so I did delete the uSD and restart over. No way to get the gateway on work.I did try 3 amplified antenna + 2 normal. No way.I did enable from raspi-config the SPI (and only it).It hangs on second line of output.These are the logs:sineverba@raspberrypi:~/MySensors $ ./configure --my-transport=nrf24 --my-gateway=serial --my-serial-is-pty --my-serial-pty=/dev/ttyUSB020 [SECTION] Detecting target machine. [OK] machine detected: SoC=BCM2837, Type=rpi3, CPU=armv7l. [SECTION] Detecting SPI driver. [OK] SPI driver detected:BCM. [SECTION] Detecting init system. [OK] init system detected: systemd. [SECTION] Saving configuration. [SECTION] Cleaning previous builds. [OK] Finished. sineverba@raspberrypi:~/MySensors $ make gcc -MT build/drivers/Linux/log.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/log.c -o build/drivers/Linux/log.o g++ -MT build/drivers/Linux/IPAddress.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/IPAddress.cpp -o build/drivers/Linux/IPAddress.o g++ -MT build/drivers/Linux/noniso.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/noniso.cpp -o build/drivers/Linux/noniso.o g++ -MT build/drivers/Linux/GPIO.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/GPIO.cpp -o build/drivers/Linux/GPIO.o g++ -MT build/drivers/Linux/SPIDEV.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/SPIDEV.cpp -o build/drivers/Linux/SPIDEV.o g++ -MT build/drivers/Linux/Print.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/Print.cpp -o build/drivers/Linux/Print.o g++ -MT build/drivers/Linux/EthernetClient.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/EthernetClient.cpp -o build/drivers/Linux/EthernetClient.o g++ -MT build/drivers/Linux/compatibility.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/compatibility.cpp -o build/drivers/Linux/compatibility.o g++ -MT build/drivers/Linux/SerialPort.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/SerialPort.cpp -o build/drivers/Linux/SerialPort.o g++ -MT build/drivers/Linux/Stream.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/Stream.cpp -o build/drivers/Linux/Stream.o g++ -MT build/drivers/Linux/interrupt.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/interrupt.cpp -o build/drivers/Linux/interrupt.o g++ -MT build/drivers/Linux/SerialSimulator.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/SerialSimulator.cpp -o build/drivers/Linux/SerialSimulator.o g++ -MT build/drivers/Linux/SoftEeprom.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/SoftEeprom.cpp -o build/drivers/Linux/SoftEeprom.o g++ -MT build/drivers/Linux/EthernetServer.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/Linux/EthernetServer.cpp -o build/drivers/Linux/EthernetServer.o g++ -MT build/examples_linux/mysgw.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c examples_linux/mysgw.cpp -o build/examples_linux/mysgw.o gcc -MT build/drivers/BCM/bcm2835.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/BCM/bcm2835.c -o build/drivers/BCM/bcm2835.o g++ -MT build/drivers/BCM/BCM.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/BCM/BCM.cpp -o build/drivers/BCM/BCM.o g++ -MT build/drivers/BCM/SPIBCM.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/BCM/SPIBCM.cpp -o build/drivers/BCM/SPIBCM.o g++ -MT build/drivers/BCM/Wire.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/BCM/Wire.cpp -o build/drivers/BCM/Wire.o g++ -MT build/drivers/BCM/RPi.o -MMD -MP -march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_SERIAL -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_LINUX_SERIAL_PTY=\"/dev/ttyUSB020\" -DMY_LINUX_IS_SERIAL_PTY -Ofast -g -Wall -Wextra -I. -I./core -I./drivers/Linux -I./drivers/BCM -c drivers/BCM/RPi.cpp -o build/drivers/BCM/RPi.o g++ -pthread -o bin/mysgw build/drivers/Linux/log.o build/drivers/Linux/IPAddress.o build/drivers/Linux/noniso.o build/drivers/Linux/GPIO.o build/drivers/Linux/SPIDEV.o build/drivers/Linux/Print.o build/drivers/Linux/EthernetClient.o build/drivers/Linux/compatibility.o build/drivers/Linux/SerialPort.o build/drivers/Linux/Stream.o build/drivers/Linux/interrupt.o build/drivers/Linux/SerialSimulator.o build/drivers/Linux/SoftEeprom.o build/drivers/Linux/EthernetServer.o build/examples_linux/mysgw.o build/drivers/BCM/bcm2835.o build/drivers/BCM/BCM.o build/drivers/BCM/SPIBCM.o build/drivers/BCM/Wire.o build/drivers/BCM/RPi.o sineverba@raspberrypi:~/MySensors $ sudo ./bin/mysgw –d [sudo] password for sineverba: mysgw: Starting gateway... mysgw: Protocol version - 2.2.0-rc.2
-
Hi to all,
I'm testing an ethernet gateway on RPI3, with nrf24 + 1 node with a relay.I want introduce security and signing. On Arduino gateway / node no problem at all, but, how to do on the RPI3 as gateway?
I would get / create / set a software serial on PI itself and whitelisting it on the node, after I will introduce the AES Key and signing.
Cannot find in documentation how do it on PI3. Thank you very much!
-
@sineverba said in
Building a Raspberry Pi Gateway:Hi to all,
I'm testing an ethernet gateway on RPI3, with nrf24 + 1 node with a relay.I want introduce security and signing. On Arduino gateway / node no problem at all, but, how to do on the RPI3 as gateway?
I would get / create / set a software serial on PI itself and whitelisting it on the node, after I will introduce the AES Key and signing.
Cannot find in documentation how do it on PI3. Thank you very much!
Earlier in this forum... https://forum.mysensors.org/topic/4803/building-a-raspberry-pi-gateway/350
-
@mfalkvidd I'm trying today, but to compile correctly the Docker image I'll have to clone to my github account
 or at least locally. My Dockerfile for the "Alpine edition" for Hass.io is simply:
or at least locally. My Dockerfile for the "Alpine edition" for Hass.io is simply:ARG BUILD_FROM ARG BUILD_ARCH ARG BUILD_DATE ARG BUILD_REF ARG BUILD_VERSION FROM ${BUILD_FROM} ENV CONFIG_PATH=/data/options.json ENV APPDIR=/opt/MySensors RUN apt-get update && apt-get install -y --force-yes \ make \ g++ \ git \ && rm -rf /var/lib/apt/lists/* /tmp/* /var/tmp/* ~/.cache \ && git clone https://github.com/mysensors/MySensors.git --branch development $APPDIR # Copy root filesystem COPY rootfs / #CMD [ "/run.sh" ]I deleted the LABELS 'cause... the data is still too rawly "buried" from others.

The Configure and Make is in run.sh.
BTW, I still need to figure out how to start mysgw as service... Mainlyt I'd like to redirect the log: how can I do this safely?
And... can I use the rx/tx/err led feature on Raspi too (aside being in a Docker) ?
EDIT: the code add works!
Another question: I'm not getting far from this... what is it trying to do?: Starting gateway... : Protocol version - 2.2.0-rc.2 : MCO:BGN:INIT GW,CP=RNNGL---,VER=2.2.0-rc.2 : TSF:LRT:OK : TSM:INIT : TSF:WUR:MS=0
-
@ghiglie Thank you, I did see that was for 2.1.1. Just playing with them!
-
Does the Pi Gateway support the MY_SIGNING_SIMPLE_PASSWD option? I couldn't find anything about that. I've been gearing up to use that feature in my network, but I've also been playing with moving my gateway onto my Pi Zero W.
-
@alowhum If you want to just encrypt data, just add the encryption key in the myconfig.h file and compile it
-
@gohan N00b question, but which steps from the step-by-step need to be redone to "compile it" after altering myconfig.h? Or can you just post the command lines?

-
As soon as you do the changes in myconfig.h before the MAKE, you are fine
-
Anyone tried using the new Pi Zero WH as a Raspberry Pi Gateway. Presumably by MQTT and using NRF24 radio?
@alowhum Have you been able to setup a gateway with your Raspberry Pi Zero?
-
@sentur That's what I'm doing now. Except mine is Zero W. Soldered the pins on myself.
-
@alowhum yes, to use MY_SIGNING_SIMPLE_PASSWD feature, add the following to your list of configure options:
... --my-signing=password --my-signing-password=<PASSWORD>
-
Is there anyway where i can see if i have IRQ configured ?
ive build it a long time ago, but now upgraded to a nrf24 PA/LNA and have more an more sensors.
-
look inside makefile.inc in mysensors folder, that should contain the parameters you set in ./configure
-
@gohanm, as it seems not ?, can i rebuild it easily? ```
SOC=BCM2837
CPPFLAGS=-march=armv8-a+crc -mtune=cortex-a53 -mfpu=neon-fp-armv8 -mfloat-abi=hard -DMY_RADIO_NRF24 -DMY_GATEWAY_LINUX -DMY_DEBUG -DLINUX_SPI_BCM -DLINUX_ARCH_RASPBERRYPI -DMY_PORT=5003
LDFLAGS=-pthread
PREFIX=/usr/local
CC=gcc
CXX=g++
BUILDDIR=build
BINDIR=bin
GATEWAY_DIR=/usr/local/bin
INIT_SYSTEM=systemd
SPI_DRIVER=BCM```
-
make a copy of it and make a ./configure with the IRQ enabled and see what you get
-
@gohan make a copy of the makefile.inc and restart the ./configure command again you mean ?
ill try it tomorrow, too afraid to break things late in the evening
-
as far as you don't execute the MAKE command you are ok. Also make a copy of the mysgw executable just as backup if you never did it
-
but ill have to do it sometime , just ./configure with all the options, build , test and install ?
-
if you only want to check if irq is enabled, otherwise you could just build it fresh with irq enabled and you can go back by replacing the mysgw executable
-
@gohan ty
-
This post is deleted!
-
Moved to normal troubleshooting forum
-
This post is deleted!
-
@MasMat Yes I was able to build it on a Pi Zero. I did a fresh install on Dietpi. It worked fine when I didn't give any configuration options.
Now, however, I am still trying to run something on the PGIO pins in paralel to MySensors again, and this is not working. As I speak the Pi reboots every 5 minutes.. Not sure what to blame yet. Domoticz, PiGPIO, or MySensors.
Latest DietPi Stretch, latest Domoticz beta, latest MySensors beta.
-
-
@alowhum I'm not using the GPIO for anything else.
I had everything working (mysgw-MQTT, Mosquitto, Node-Red and OH2) for almost 6h. Then I moved the set-up and everything went south: cant get mosquitto to start, cant get mysgw to connect to that or another Mosquitto broker, OH2 seems to ignore everything...
Spent the last 24h trying to resurrect Mosquitto but it's beyond me what's wrong.I remember reading that mysgw renders rest of the gpio unusable. Maybe that's giving you problems.
-
I am running 2 gateway instances, one nrf24 and one rfm69 so I guess you can run other things
-
@gohan: but you had to do a lot of black magic to get there right?
-
not at all, I just followed the guide in the forum
-
@masmat I got the Pi Zero W working fine with other things using the GPIO.
- A fresh install helped
- It could be that I now use the PiGPIO library for the project.
- It could be the switch to another powersupply. I was using the official pi powersupply, but I suspect something was wrong with it. A cheap 3A chinese adapter is working fine.
Either way: it all works now.
I have a few n00bish questions about enabling encryption (without signing, so save space and ram):
- Is putting an AES key in MyConfig.h really all I have to do? Don't I also have to put that in all the sensor nodes? And is that proces complicated, using a signing sketch and whatnot?
- Can I have an 'opportunistic' network, where I have some encrypted nodes, and some unencrypted ones? If I could mix them this would make switching to encryption less stressful. I can't easily change two of my nodes.
- If I change the network, I'd like to move the NRF to channel 100 (juist outside of the normal WiFi frequencies). Do I also have to set that in all nodes, or is setting it in the gateway enough?
-
@alowhum encryption is all or nothing. You can't leave one node without encryption if your gateway encrypts the messages it send.
And you will need to personalize your nodes to get the AES key into them. The documentation on security describes that process.
-
@alowhum if you put it in myconfig.h also on the arduino library you can just recompile the nodes and you are good.
-
@gohan not anymore. Only for pre 2.2.0 releases.
-
It is still working on mine

-
@gohan in other words, you use an old release
-
I can assure you I am using 2.2 from development as I am also running new driver. So unless you changed something in the last 3 weeks on the development branch it still works, unless the nodes are keeping the key saved.
-
@gohan have you verified your communications are actually encrypted?
-
@gohan If you see here, you will find that unless you use the simple password option, AES key is fetched from EEPROM: https://github.com/mysensors/MySensors/blob/28c4f3f19e7026f56fd9bbc61d566f770fd7a9d2/hal/transport/MyTransportRF24.cpp#L68
So either you are using the simple flag, nothing at all, or not using the key you think you use.
-
I ll have to check, but I put the key in the gateway myconfig.h
-
@gohan Perhaps on a rpi GW where there is no EEPROM, but I am talking about the nodes.
-
Well, if I have communication working it means the node should be encrypting data. I'll have to try with clear eeprom and try flashing sketch again
-
@gohan not if there is no encryption at all. You could try to use simple password option on a node with various passwords and see if it is detected by your gw at all.
-
@anticimex I guess you were right... the gw and node aren't using the AES key. So where am I supposed to add it in the gateway?
-
@gohan you set that with the configure arguments I suspect, but I can't see it in the documentation. @marceloaqno perhaps knows how the rPi port handles this. I'm on a phone so I can't check the code easily. But you should be able to find it in the transport driver for rPi. On the rPi it can probably be defined in the code as it does not have a personalizer.
-
@anticimex It doesn't read it from the mysonfig.h for sure as it is where I always put it
-
@gohan MyConfig.h does to my knowledge not have a define value for that. You cannot add new definitions to it and expect them to have an effect. If there is one already defined in there, as a comment or not, and it does not have an effect, please report a bug on it.
-
@macvictor
I followed all the step that you mentioned in your post to establish the serial gateway. However I am still not able to receive the message from arduino. Could you please what to do?import RPi.GPIO as GPIO
from lib_nrf24 import NRF24
import time
import spidevGPIO.setmode(GPIO.BCM)
pipes = [[0xE8, 0xE8, 0xF0, 0xF0, 0xE1], [0xF0, 0xF0, 0xF0, 0xF0, 0xE1]]
radio = NRF24(GPIO, spidev.SpiDev())radio.begin(0,8)
radio.setPayloadSize(32)
radio.setChannel(0x76)
radio.setDataRate(NRF24.BR_1MBPS)
radio.setPALevel (NRF24.PA_MAX)
radio.setAutoAck(True)
radio.enableDynamicPayloads()
radio.enableAckPayload()
radio.openReadingPipe(1 ,pipes[1])
radio.printDetails()
radio.startListening()
radio.GPIO.cleanup()Please find below my raspberry code..can you please suggest , if there is any issue with code or am I missing anything ?
-
@rajeev2301 please don't split our effort to help you into multiple threads. It wastes people's time when some information is in one thread and some in another thread.
-
To upgrade to the latest release, can I use git pull, or is it better to delete the directory and start again?
-
@wes you can pull. Just as long as you verify that your working directory is clean or only contains changes you intend to have. And you have the appropriate branch or tag checked out.
-
@macvictor
Hi
Is any chance to add security & signing for radio RFM69HW ? Please help me how ?
-
@pepson signing is radio agnostic. It has nothing to do with the radio.
-
@anticimex @wes Can I please ask how to update? I mean, the right command to type.
I have the folder "MySensors" on documents of my user in Pi:/home/sineverba/MySensors
Of course I have all installed and perfectly working now (I'm on the 2.2.0 rc2).
I need also to relaunch the ./config command?
Thank you to both and all!
-
-
Hello, I configure the raspberry gateway to use MQTT. I set mosquitto as the broker. The problem that I encounter is that when I subscribe to test if the gateway publish on the broker, I have empty message. So my first guess is that there is an issue somewhere which cause that only empty message are sent.
Here is my arduino code : https://pastebin.com/YKi4EAad
The RasperryPI3 config & logs : https://pastebin.com/Kjn8CC8A
The MQTT Client logs : https://pastebin.com/ZP8GrkTj
-
Regarding the communication issues described in the instructions page with the 2.2 stable version, is that still valid and still recommended to use the development branch?
-
Go for stable now, I need to remove that line from the page
-
@gohan Thank you verys muchos.

-
@syna It is empty because it's a message of type I_ID_REQUEST that your node is sending. You need to set up a controller to distribute IDs or you can set it manually by adding this to your node's sketch:
#define MY_NODE_ID Xwhere X is a unique number from 1 to 254.
-
Hi to all,
tonight I made update from 2.2.0 RC2 to 2.2.0 (stable) on my Raspberry PI3.
It is a live system (my heater control).By the way the update is very simple.
First of all, backup or better CLONE your PI.
1 - Disable the daemon with
sudo systemctl stop mysgw.service && sudo systemctl disable mysgw.service2 - Make a copy of the MySensors folder ( I made a copy with the name of version coming, so...)
cp -r MySensors MySensorsX.X.X(rc2)/(the slash at the end means "It's a folder!"
3 - Remove the MySensors folder
sudo rm -r MySensors4 - Git the "new" MySensors folder && configure it as usual. Remember to activate the daemon and see on Domoticz (for example) the gateway with new version
")
-
Hi,
I am running the current version (2.2.0) on a RPi 1.
I noticed that sometimes the cpu usage of the service is increasing dramatically (around 90% and more) - and then the service stops working.
As I am not a C-Pro, I wrote a little python-script, which is called every minute by cron and restarts the service, if it uses more than 50% cpu.
Maybe someone will find it useful:# -*- coding: utf-8 -*- import psutil, sys, os, datetime PY3 = sys.version_info[0] == 2 LOOKFOR = u"mysgw" for proc in psutil.process_iter(): if proc.name() == "mysgw": dt = str(datetime.datetime.now()).split('.')[0] #print(proc) cpu = proc.cpu_percent(interval=1) #print(cpu) #print(proc.cpu_times()) if cpu > 50: print(dt + " high CPU-usage! --> restarting service") os.system("/bin/systemctl restart mysgw.service") else: if datetime.datetime.now().strftime('%M') == "45": print(dt + " everything OK, cpu: " + str(cpu))and the crontab-entry (as root):
* * * * * /home/pi/pstest.sh >> /var/log/mysgw-logger.logCheers,
Pula
-
@otto001 Thanks for that! I'm also getting this annoying service failure on 2.2 on a RPi 2. It seems to happen at random at night when nothing much is going on in the house. It probably happens once every 1 to 2 weeks.
CPU use is almost 100% and the service stops working.
Are there any logs I can check? I'd prefer to know what's wrong although I'll go with the auto restart on high cpu use to prevent the house from ceasing to function at random!
-
I once noticed this too, on a pi zero system with domoticz beta.
-
@Nick-Willis:
I do run the gateway in debug mode, but I could not see anything special.
Yesterday the service was auto-restarted by my script:2018-02-27 13:31:03 high CPU-usage! --> restarting service```On the same time in the "normal" mysgw.log (debugging enabled) (should be syslog normally, but I changed the logfile location for better investigation):
Feb 27 13:30:36 raspiez mysgw: TSF:MSG:READ,14-14-0,s=1,c=1,t=23,pt=7,l=5,sg=0:0.11 Feb 27 13:30:36 raspiez mysgw: TSF:MSG:READ,14-14-0,s=3,c=1,t=0,pt=7,l=5,sg=0:21.9 Feb 27 13:30:36 raspiez mysgw: TSF:MSG:READ,14-14-0,s=4,c=1,t=1,pt=7,l=5,sg=0:31.4 Feb 27 13:30:38 raspiez mysgw: New connection from 192.168.1.11 <-- fhem re-connects Feb 27 13:30:38 raspiez mysgw: GWT:TSA:C=1,CONNECTED Feb 27 13:31:04 raspiez mysgw: Received SIGTERM <-- AUTO-RestartThe only thing that is a little bit unusual is the re-connect of my controller (fhem) - but this happens every 30 minutes for stability reasons.
This should not happen, but I can not find out what the problem is.Maybe you could also enable debugging by changing the following file (maybe we can find a pattern why this is happening):
/etc/systemd/system/mysgw.servicefrom
ExecStart=/usr/local/bin/mysgwto
ExecStart=/usr/local/bin/mysgw -dPlease do not forget to issue a
sudo systemctl daemon-reloadfollowed by
sudo systemctl restart mysgw.serviceto enable the change.
My restarting-script might help until someone with better knowledge finds a solution...
I also will have an eye on the logs for findig out how often this is happening...Cheers,
Otto
-
Please, could all of you who experienced this issue post the configuration options you used to build the gateway?
This would help to investigate the problem.
-
@marceloaqno : of course, thanks for the hint!
I had the following configure:
./configure --my-transport=nrf24 --my-rf24-irq-pin=15 --my-gateway=ethernet --my-port=5004(The high CPU problem also occured before I connected PIN 15 to IRQ without the corresponding config option. I hoped to solve the Problem using IRQ, but this did not help. And I have a second GW with default port 5003 in my network. This is running an ancient version of Raspi GW Software and this is working fine -but slower). I am using current fhem as controller and I have it connecting every 30 minutes to the gateways due to stability issues in the past. There are only about 6 nodes (just motion, humidity & temp and lux) connected to this gateway.
In addition to that I changed the default channel in MyConfig.h (because I have two different MySensor networks):
#ifndef MY_RF24_CHANNEL #define MY_RF24_CHANNEL (82) #endifI am pretty sure, that this is not important, but I also set up rsyslog to write gw logs to an own file instead of syslog....
Maybe this helps.
Cheers,
Otto
-
@otto001 I think I found the problem. I wrote a fix for it:
https://github.com/marceloaqno/MySensors/commit/ca8865d8e1fe1b08195943fae1640d5fddb81924
-
@marceloaqno : Wow, you are fast! Thanks!
Just applied the patch and recompiled. I will report in a couple of days while my monitoring-script is still running (and logging)...Cheers,
Otto
-
@marceloaqno I am also recompiling and testing.
thanks for the (hopeful) fix
I will report back with my status in a few days
-
At first, THANKS for your help. CPU usage does not rise anymore.
But unfortunately no more node READs after the same situation:Mar 4 07:00:09 raspiez mysgw: TSF:MSG:READ,14-14-0,s=255,c=3,t=6,pt=1,l=1,sg=0:0 Mar 4 07:00:09 raspiez mysgw: TSF:MSG:READ,12-12-0,s=255,c=3,t=6,pt=1,l=1,sg=0:0 Mar 4 07:00:09 raspiez mysgw: GWT:RFC:C=1,MSG=14;255;3;0;6;M Mar 4 07:00:09 raspiez mysgw: !TSF:MSG:SEND,0-0-14-14,s=255,c=3,t=6,pt=0,l=1,sg=0,ft=0,st=NACK:M Mar 4 07:00:09 raspiez mysgw: TSF:MSG:READ,11-11-0,s=255,c=0,t=18,pt=0,l=3,sg=0:1.5 Mar 4 07:00:09 raspiez mysgw: GWT:RFC:C=1,MSG=12;255;3;0;6;M Mar 4 07:00:09 raspiez mysgw: TSF:MSG:SEND,0-0-12-12,s=255,c=3,t=6,pt=0,l=1,sg=0,ft=0,st=OK:M Mar 4 07:00:13 raspiez mysgw: TSM:READY:NWD REQ Mar 4 07:00:13 raspiez mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK: Mar 4 07:00:13 raspiez mysgw: TSF:SRT:OK Mar 4 07:00:13 raspiez mysgw: TSF:SAN:OK Mar 4 07:00:37 raspiez mysgw: Ethernet client disconnected. Mar 4 07:00:37 raspiez mysgw: New connection from 192.168.1.11 Mar 4 07:00:37 raspiez mysgw: GWT:TSA:C=0,CONNECTED Mar 4 07:00:37 raspiez mysgw: GWT:TSA:C=1,DISCONNECTEDAfter this point (again after a reconnect from the controller) no more messages from any node PLUS the cpu usage stayed normal (what makes it even worse at this moment, as I would have to create a script which monitors the logfile and restarts the mysgw service in this situation). As soon as the service is restarted, everything is working fine again.
What happens after this point in the log:
Mar 4 07:00:37 raspiez mysgw: GWT:RFC:C=0,MSG=0;0;3;0;2; Mar 4 07:15:13 raspiez mysgw: TSF:SAN:OK Mar 4 07:20:13 raspiez mysgw: TSM:READY:NWD REQ Mar 4 07:20:13 raspiez mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK: Mar 4 07:30:13 raspiez mysgw: TSF:SRT:OK Mar 4 07:30:13 raspiez mysgw: TSF:SAN:OK Mar 4 07:30:37 raspiez mysgw: GWT:TSA:C=0,DISCONNECTED Mar 4 07:30:37 raspiez mysgw: Ethernet client disconnected. Mar 4 07:30:37 raspiez mysgw: New connection from 192.168.1.11 Mar 4 07:30:37 raspiez mysgw: GWT:TSA:C=0,CONNECTED Mar 4 07:30:37 raspiez mysgw: GWT:RFC:C=0,MSG=0;0;3;0;2; Mar 4 07:40:13 raspiez mysgw: TSM:READY:NWD REQ Mar 4 07:40:13 raspiez mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK: Mar 4 07:45:13 raspiez mysgw: TSF:SAN:OK Mar 4 08:00:13 raspiez mysgw: TSM:READY:NWD REQ Mar 4 08:00:13 raspiez mysgw: TSF:MSG:SEND,0-0-255-255,s=255,c=3,t=20,pt=0,l=0,sg=0,ft=0,st=OK: Mar 4 08:00:13 raspiez mysgw: TSF:SRT:OK Mar 4 08:00:13 raspiez mysgw: TSF:SAN:OK Mar 4 08:00:37 raspiez mysgw: GWT:TSA:C=0,DISCONNECTED Mar 4 08:00:37 raspiez mysgw: Ethernet client disconnected. Mar 4 08:00:37 raspiez mysgw: New connection from 192.168.1.11 Mar 4 08:00:37 raspiez mysgw: GWT:TSA:C=0,CONNECTEDand so on....
It seems that the increasing cpu usage is only a symptom for the real problem.
As I am using this in production I will dis-apply the patch and use the daemon as before (beacuse using the python script for cpu-usage-monitoring makes the situation somehow controllable for me).
Maybe you could have an additional eye on this please? Could I help you with further information? Maybe I could add some additional logging somewhere in the code?Thanks again and cheers,
Otto
-
@otto001 I'm trying to reproduce this problem, but so far I've got nothing beyond the normal behavior of mysgw.
I tried with a RPi1 and RPi3 using the fhem controller with the latest raspbian.
-
@marceloaqno said in
Building a Raspberry Pi Gateway:@otto001 I'm trying to reproduce this problem, but so far I've got nothing beyond the normal behavior of mysgw.
I tried with a RPi1 and RPi3 using the fhem controller with the latest raspbian.My uptime is at 4 days now. so far still working with your patch. CPU is at 2% and sensor network still working correctly. will report if that changes.
-
I've been using your restarting method and its been working ok and has done one restart in 5 days.
However I now see something else where altho cpu use is fine, none of my nodes can communicate to the gateway. My controller can connect to the gateway no problem but there are no messages received. Restarting nodes does not help. Only a manual restart of the gateway gets things going again - at least for a while anyway.
Where is the log output from the gateway to be found? I know it can be run from the bash prompt to write the output to screen but how about logging the installed service output?
-
@nick-willis the log is sent to syslog by default. See https://www.mysensors.org/build/raspberry#troubleshooting for details.
-
@marceloaqno : This is strange. I am using a RPi 1 on this gateway with raspbian Jessie. Beside the GW-service there is only a small python programm which listens on an UPD-Port and plays an mp3 if it receives suitable data (for doorbell). Since March 4, 20:15 there were several restarts due to high cpu usage (after dis-applying your patch):
2018-03-04 23:01:03 cpu (99.7) very high! --> restarting service 2018-03-05 07:31:03 cpu (99.7) very high! --> restarting service 2018-03-05 11:01:03 cpu (98.7) very high! --> restarting service 2018-03-05 13:31:04 cpu (94.7) very high! --> restarting service 2018-03-06 11:31:03 cpu (99.7) very high! --> restarting service 2018-03-06 12:31:03 cpu (98.7) very high! --> restarting service 2018-03-07 06:01:03 cpu (94.8) very high! --> restarting service 2018-03-07 22:31:03 cpu (99.8) very high! --> restarting serviceWith this "auto-restarts" the sensors are working fine, I did not notice any problems.
However, I just upgraded to the recent Stretch (what takes a LONG time on RPi 1 and made me struggle a little bit with the new network names). I also rebuilt the GW of course and will report here what will happen....
@Nick-Willis : did you apply the patch of marceloaqno or not? Did you enable debugging? (see here )
Cheers,
Otto